Konradicus
Usuario (Argentina)
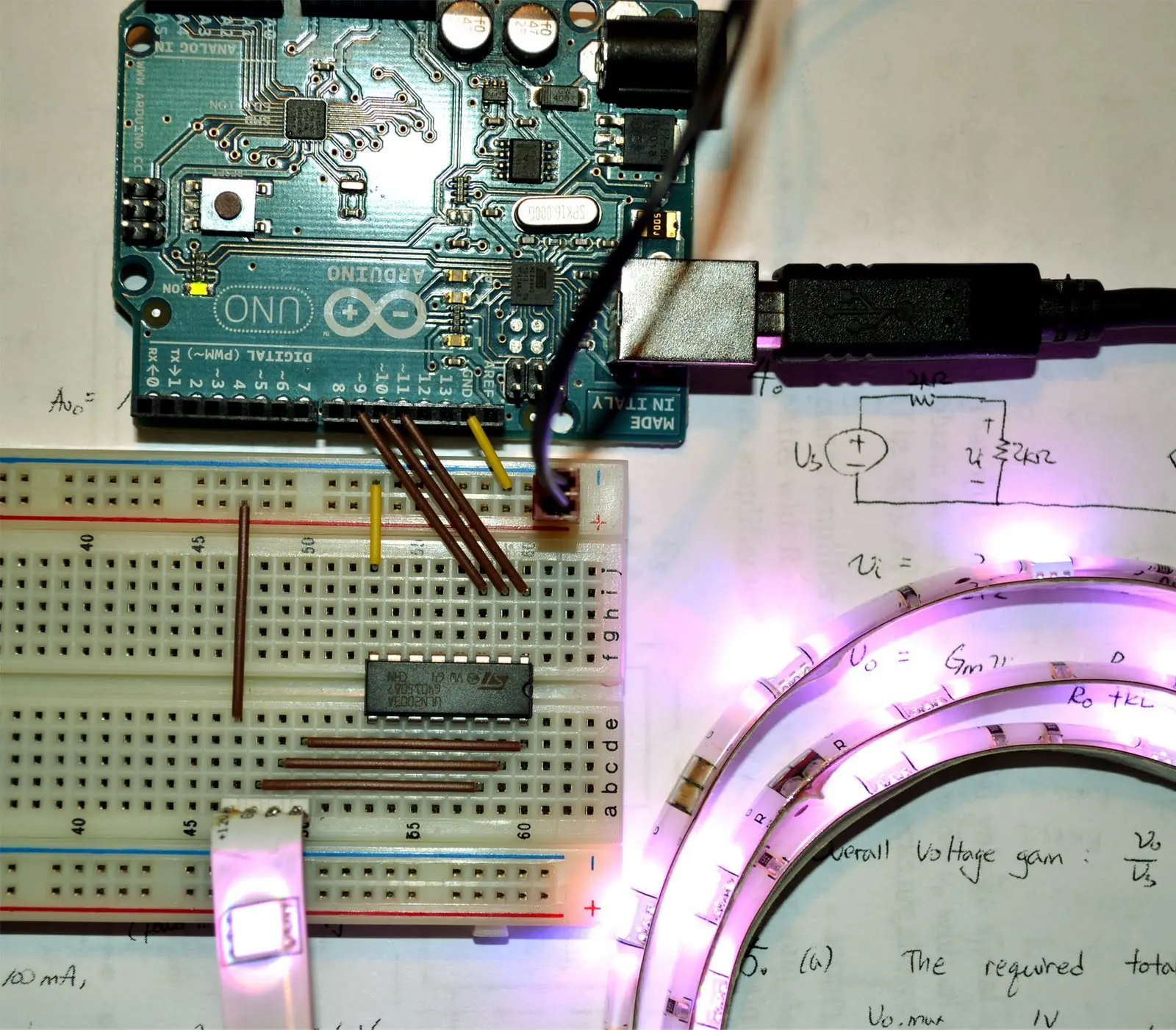
Manejo Tira de Leds con el celular – via Bluetooht – Arduino Un LED RGB es un dispositivo único que tiene tres canales LED de colores (Rojo, Verde y Azul) y el control no es nada más que el conjunto de tres LEDs con un ánodo común. Vamos a explicar cómo con unos sencillos pasos tendremos nuestra unidad de control led montada para poder utilizarla y controlar desde nuestro móvil o Tablet los led de nuestra casa o negocio. Elementos Necesarios En primer lugar vamos a recopilar todos los elementos que necesitamos. -Arduino (Uno, Mega o Nano) -Módulo bluetooth JY-MCU -Array de transistores ULN2003A -Tiras de led 5050 RGB Ánodo Común -Alimentación led 12v -Software: Arduino y APP Omniblug -Módulo bluetooth JY-MCU: Puedes leer el artículo donde se explica su uso completo. No es necesario para éste tutorial. -Tira led 5050 RGB: La tira de led RGB se compone de 4 hilos, uno para 12V fuente de alimentación y los tres cátodos (G (verde) B (azul) R (rojo)), como incluye resistencia se puede aplicar directamente 12V como voltaje de entrada. -ULN2003A: Array de transistores. Si alguien tiene más interés sobre este componente puede ver su ficha técnica. Esquema de conexión A continuación vamos a montar el circuito eléctrico. Es importante tener en cuenta que este esquema está pensado para suministrar una intensidad de 500mA por cada canal RGB. (1 tira de led de 1 metro por canal). Si necesitas conectar más led, necesitará de un amplificador de potencia que suministre intensidad suficiente para su instalación. Utilizamos las salidas analógicas de nuestro arduino para controlar cada canal RGB. Recordad que el módulo bluetooth puede ser alimentado desde 3.3v a 6v y lo estamos alimentado desde el microcontrolador ya que su máximo consumo es mínimo y nos permite tener un control más exhaustivo del mismo. Una vez que tenemos montado nuestro circuito vamos a proceder a programar el microcontrolador. Para programar nuestro arduino debéis tener instalado el software y cargar el siguiente scket . Código Programación --------------------------------------------- //visitanos en http://kaiwatechnology.com.ar/ --------------------------------------------- librerias #include EEPROM.h int ledRojo = 10; int ledVerde=11; int ledAzul=9; int ledRojo2 = 5; int ledVerde2=6; int ledAzul2=3; int red; int green; int blue; int accion=0; int bluetooth=2; int puerto=0; int primeraVez; int pinDefecto=1234; void setup() { pinMode(bluetooth,OUTPUT); digitalWrite(bluetooth,HIGH); Serial.begin(9600); primeraVez=EEPROM.read(0); if(primeraVez!=1){ color(0,255,255); programer(pinDefecto); EEPROM.write(0,1); color(255,0,255); } } void loop() { while (Serial.available() 0) { accion = Serial.parseInt(); if(accion==1){ puerto=Serial.parseInt(); red = Serial.parseInt(); green = Serial.parseInt(); blue = Serial.parseInt(); } if (Serial.read() == 'n') { color(red,green,blue); } } if(accion==2){ color(0,255,255); delay(500); color(255,0,255); delay(500); color(255,255,0); delay(500); } if(accion==3){ int pin = Serial.parseInt(); if (Serial.read() == 'n') { color(255,0,0); programer(pin); accion=0; color(0,255,0); } } } void programer(int pin){ digitalWrite(bluetooth,LOW); delay(250); digitalWrite(bluetooth,HIGH); delay(5000); Serial.print(AT); delay(1000); Serial.print(AT+NAMEOMNIBLUG); delay(1000); Serial.print(AT+PIN+pin); delay(1000); digitalWrite(bluetooth,LOW); delay(250); digitalWrite(bluetooth,HIGH); } void color(int rojo, int verde, int azul){ if(puerto==1){ analogWrite(ledRojo, rojo); analogWrite(ledVerde, verde); analogWrite(ledAzul, azul); } if(puerto==2){ analogWrite(ledRojo2, rojo); analogWrite(ledVerde2, verde); analogWrite(ledAzul2, azul); } if(puerto==3){ analogWrite(ledRojo, rojo); analogWrite(ledRojo2, rojo); analogWrite(ledVerde, verde); analogWrite(ledVerde2, verde); analogWrite(ledAzul, azul); analogWrite(ledAzul2, azul); } } Una vez cargado, tienen que esperar sobre unos 10 segundos ya que de inicio se programa el módulo bluetooth para su primer uso. El fin del proceso de programado del bluetooth ha terminado cuando los led del canal 1 cambien de color Rojo a color Verde. Una vez que vemos los led de color verde hemos terminado con la configuración de nuestra unidad de control y ya la tendremos disponible para su uso. Por último nos queda instalar la aplicación Omniblug en nuestro dispositivo Android. Accedemos a Google Play y la instalamos. Una vez que abrimos la aplicación se nos pedirá conectar con nuestro dispositivo bluetooth, realizamos un escaneo y elegimos Omniblug para conectarnos. Introducimos el pin por defecto “1234”. Desde las opciones de aplicación podemos modficar el pin del dispositivo para evitar que otras aplicaciones puedan conectarse. No obstante solo se nos pedirá el pin la primera vez para proceder con el emparejado de nuestro Omniblug. Si el emparejado ha sido correcto, nuestra aplicación cambiará a la pantalla de control. Y esto es todo. Ya tenemos nuestra unidad de control led RGB funcionando. Este Proyecto, videos, tutoriales y mucho mas en... http://kaiwatechnology.com.ar/

Ensamblado del KIT Brazo Robòtico V1.0 Recordar que este kit lo pueden adquirir en nuestra pagina web: http://kaiwatechnology.com.ar/ O en mercadolibre: http://articulo.mercadolibre.com.ar/MLA-584733610-kit-arduino-brazo-robtico-avellaneda-quilmes-bernal-ktech-_JM El Kit viene con: 1 - Arduino Nano 1 - Shield Arduino nano 1 - Porta Baterias AA 1 - Piezas para armar el Brazo Impresas en 3D 5 - Servos Sg90 1 - Control de play 2 inalambrico recargable Entonces, en esta primera imagen observamos todas las piezas mecánicas que vienen en el kit con lso servo motores. Ensamblado del Robot 0) Esta seria la Disposición final de las piezas a utilizar con las nomenclaturas de las mismas. 1) Comenzamos a ensamblando la base del brazo. 2) Primero insertamos el cable del servo a través de los agujeros , sacando el cable por el costado. 3) Insertamos el Servo motor dentro del soporte. 4) Procedemos a Atornillarlo con los tornillos que vienen dentro de la bolsita del servo motor. 5) Una vez fijado el servo inferior, procedemos a montar la base del servo de hombro. Para ello cortamos uno de lso pines que vienen en las bolsitas plasticas de los servos y lo dejamos lo mas redondo posible para luego poder insertarlo en el agujero de la parte inferior. Luego perforamos un poco mas Lo que seria el agujero de la parte inferior de la base para que nuestro ADAPTADOR que preparamos lo mas redondo posible pueda entrar en el mismo. Una vez hecho todo esto, procedemos a pegar ambas partes con pegamento de secado rápido (ya sea la gotita o poxiran) 6) Asi se ve desde arriba la base del servo hombro ya montado. 7) Procedemos a atornillar dicha base para que no se salga y quede bien rigida a la base. 8)Montamos el servo dentro de la base Hombro. 9)Asi se ve de frente el servo Hobro ya montado, le faltan los tornillos. 10) Procedemos a ponerle los 2 tornillos que vienen dentro de la bolsita ziploc del mismo servo motor. 11) Colocamos la base del servo codo, montandolo primero desde el laso opuesto al eje principal del servo Hombro 12) Una vez insertado en el lado opuesto al eje del servo, procedemos a insertar también la parte del eje. 12.1) Muy importante! antes de colocar cualquiera de las partes al servo, siempre buscar la Posición cental del servo como observamos en los gráficos. Para ello colocar las fichas (PINES) plásticas que vienen en la Bolsita del Servo al mismo y comenzar a girar buscando las posiciones de tope. Una vez encontrados dichas posiciones de tope proceder a ubicarlo en una posición central. 13) Luego insertamos el PIN del servo dentro de la renura del soporte codo y a su vez lo insertamos dentro del eje del servo hombro para luego atornillarlo. 14) Observamos que el PIN servo hombro ya esta atornillado, y que el servo codo ya esta montado (es el servo de la parte superior). 15) Procedemos a colocar el soporte del Servo de la muñeca. Realizamos el mismo procedimiento anterior, primero se coloca el lado opuesto al eje del servo, y después el lado del eje servo.No importa si se tiene que realizar un poco de fuerza, las piezas son resistentes y en parte elásticas a la apertura de los mismos. 16) Procedemos a colocar el PIN del servo codo para luego atornillarlo. Recordar siempre el tema de las posiciones finales del servo, con lo cual antes de colocar y fijar los pines de cada servo , debemos buscar donde estan las posiciones finales de los mismos. Por eso en esta imagen el el soporte de la muñeca esta apuntando para abajo, lo que significa que previamente se busco el fin o tope del eje y se lo puso para abajo. Recién luego procedemos a insertar y fijar con tornillo el PIN plástico al eje del servo codo. 17) Procedemos a montar y atornillar el servo muñeca. 18) Colocamos el soporte del Servo pinza, siguiendo los mismos procedimientos antes mencionados. 19) Observamos como queda el soporte servo Pinza montado, y el PIN del servo muñeca montado y atornillado. 20) Colocamos el servo pinza y lo atornillamos en su lugar. 21) Otra perspectiva de como queda montado el servo pinza en su lugar. 22) Colocamos y pegamos con algún pegamento de secado rápido el engranaje al eje del servo pinza. Luego lo atornillamos en su lugar. Tener cuidado cuando se aplica el pegamento de secado rápido de que no ingrese ni toque la misma al servo y al eje, ya que de lo contrario no girara mas. 23) Procedemos a aplicar pegamento a los PINES de cada servo para que no tenga juego las piezas de cada articulación. 24) Colocamos las pinzas y los engranajes lineales que re pegan a las pinzas luego de montarlos y haberlos presentado a los mismos. SI lo pegamos antes de presentar las pinzas en el lugar donde van, corremos el riesgo de que no funcione el sistema. 25) Observamos la pinza y todo el sistema desde otro angulo. Esperamos que lo disfruten y nos dejen sus comentarios, opiniones y puntos! FIN Les dejo un par de videos. link: https://www.youtube.com/watch?v=sl1OsnaZ84g link: https://www.youtube.com/watch?v=2gUum9KjRBU
Robot Balancin En esta ocasión les muestro como armamos el Robot Balancin. El kit contiene: Producto Cantidad Arduino UNO 1 Driver L298 1 Porta Batería AAx4 2 Chasis Robot balancin 1 Llave On/Off 1 Motor con reducción y rueda 2 Sensores Acelerometro 3 Tornillos varios para fijar las piezas Este Kit lo ofrecemos en nuestra pagina web: http://kaiwatechnology.com.ar/ En esta primera imagen observamos todas las piezas que posee este kit que luego vamos a ir ensamblando. las piezas azules son de diseño propio e impresas en 3D Ensamblaje del Robot Balancin 1) Comenzamos con las pequeñas piezas laterales que son los soportes de los motores. 2) Fijamos los motores a dichas piezas con sus 2 tormillos de 1.5cm de largo 3) Procedemos a colocar dicho soporte a la Placa inferior del Balancin. La Placa inferior es la que tiene un agujero cuadrado en un costado. 4) Otro vistazo de como se colocan los soportes + motores a la palca inferior del balancin. 5) Y e la parte inferior colocamos la tuerca para que enrosque con el tornillo. 6) Asi quedan sujetos y fijos ambos motores a la placa inferior del balancin. 7) Procedemos a soldar los terminales de los cables macho-macho. 8) Colocamos la lave on/off en el orificio cuadrado. 9) Procedemos a colocarle 2 tuercas a las varillas roscadas. 10) Asi quedan montados y sujetados las 4 varillas. 11) Una vista mas de como queda la rueda y las varillas montadas. 12) Procedemos a montar el arduino en la placa intermedia. 13) En la parte inferior de la placa intermedia colocamos el driver L298. 14) Colocamos el acelerometro al costado del Arduino UNO. 15) Procedemos a montar la placa intermedia en las varillas. 16) Se inserta hasta que haga tope con las tuercas que antes habíamos medido. 17) Colocamos la placa superior. 18) Así queda el balancin con todos los cables montados. DIAGRAMA DE CONEXIÓN En esta imagen observamos el diagrama de conexión de los sensores. Aclaración-1: La fuente de Alimentación puede ser una batería de 9v o un pack de pilas x8 AA Aclaración-2: En caso de no estar funcionando o estar girando en sentido opuesto, dar vuelta los cables del motor en conflicto. Esquematico-balancin2 Dejamos un listado de como van conectados los pines: -Pin2 (Arduino) ->INT (Acelerometro) -Pin4 (Arduino) -> EnableB (Driver L298) -Pin5 (Arduino) -> In4 (Driver L298) -Pin6 (Arduino) -> In3 (Driver L298) -Pin9 (Arduino) -> In2 (Driver L298) -Pin10 (Arduino) -> In1 (Driver L298) -Pin11 (Arduino) -> Enable A (Driver L298) -PinSCL(Arduino) -> Pin SCL(Acelerometro) -PinSDA (Arduino) -> PIN SDA (Acelerometro) Para los que deseen conocer mas en detalle el robot, les dejo el link de mi pagina web donde ademas dejo el codigo de programacion para que cualqueira lo pueda descargar y armar! http://kaiwatechnology.com.ar/manual-armado-robot-balancin/ Por ultimo les dejo un video! link: https://www.youtube.com/watch?v=k4OLD9p-S4g Espero les haya gustado este proyecto! La robotica es apasionante y muy divertida... animo a todo aquel que quiera armar algo que no se achique...esto no es muy complicado , con un poco de ayuda y paciencia lo pueden lograr! Saludos y muchas gracias a todos!!!! PD: en Kaiwa Technology damos cursos de arduino y robotica, seran todos bien recibidos! les dejo de nuevo el link a nuestra pagina web!! http://kaiwatechnology.com.ar/