holas taringueros aficionados a la electronica..
aqui les dejo un tutorial para realizar un robot sigue luz
LISTADO DE COMPONENTES A UTILIZAR
1 PIC 16f84A (Micro-controlador).
1 Integrado LM324N (op-amps).
4 Potenciómetros de 1KΩ
.5 Resistencias de 10KΩ
.4 Resistencias de 1KΩ
.4 Resistencias de 220Ω
8 Resistencias de 270 Ω
1 Oscilador de cristal de 4Mhz.
4 Leds.4 LDR (foto resistencias).
2 Capacitadores Cerámicos 33pf (33 pico faradios).
1 Capacitador Cerámico de 0.1µf
1 Pila de 9V.
2 Transistores darlington TIP122
2 Transistores darlington TIP126
4 Transistores TIP41
2 Transistores TIP42
PROCEDIMIENTO A SEGUIR
En este proyecto nuestra primera tarea fue investigar y recopilar toda lainformación posible acerca del funcionamiento del PIC 16F84A y la función de cadauno de los componentes del sistema para poder tener una idea clara de lo que sequiere hacer. Esta tarea se realizo durante las
primeras dos semanas
calendario.Durante la
tercera semana
, se realizo el protocolo del proyecto y así presentarlo demanera formal.Luego de su aprobación de esta propuesta de proyecto, en la
cuarta semana
abriremos paso a la compra de componentes que conforman el circuito ycomprobar si están en el mercado, de otra manera se procederá a lo más prontoposible a importar los dispositivos de países vecinos.A partir de la
quinta semana
iniciaremos la fase de estudio y desarrollo de nuestroproyecto. En esta semana se procederá con la programación del PIC para que así realice las tareas que nosotros le ordenemos.Previamente de montar el circuito en el breadboard, haremos uso del laboratoriovirtual
“Proteus” para verificar y analizar su funcionamiento, además corregiremos
posibles fallas y añadiremos algunas mejoras a nuestro circuito.Posteriormente, a partir de la
sexta semana
se procederá a armar el sistema en elbreadboard para verificar su funcionamiento de forma real.Llevaremos un calendario de actividades relacionadas con este proyecto para ir lo realizando por fases planeadas para que su culminación se realice en tiempo y forma.
CIRCUITO ELECTRONICO
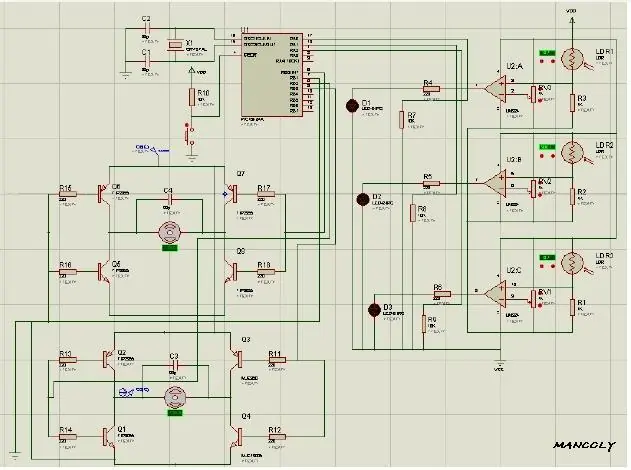
Este proyecto de un sencillo pero ingenioso diseño con motores DC que soncontrolados por el microcontrolador 16F84A. Este sistema se encarga de verificaruna fuente de luz, en este caso usamos tres sensores de luz para posicionar entrederecha, adelante e izquierda. El 16F84A se encargara de analizar los niveleslogicos de cada etapa del sensor para asi procesar y enviar las ordenes a losmotores y lograr lo que se pretende, que es mover el carrito hacia la fuente de luz.A los niveles logicos de cada sensor, en conjunto, los veremos como una secuenciade tres bits y a cada combinacion, que son 8, le asignaremos una orden especificapara que el movimiento de la araña no presente ningun problema.
A continuacion se muestra una figura que muestra las ordenes de movimiento para cada combinacion logica:
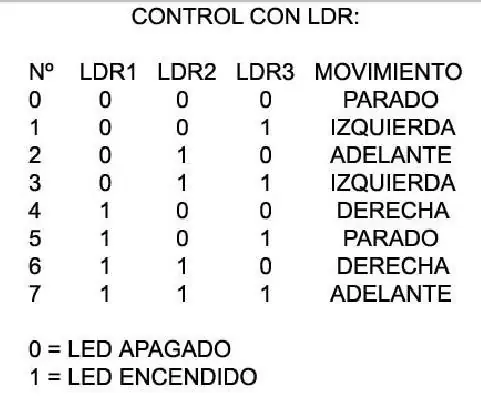
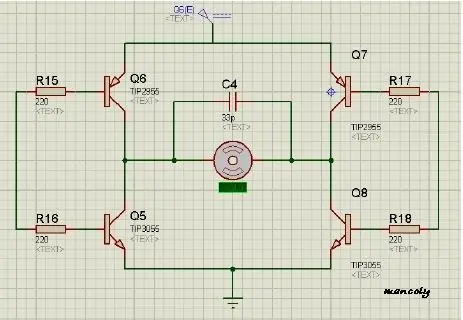
Despues de que estas combinaciones sean analizadas en el PIC16F84A, se enviaranlas ordenes a los motores. Para que el carrito logre hacer cambio de giro yretroceder nesesitaremos de anexar una etapa de potencia y control de giro. Eneste caso utilizaremos un Puente H que se alimenta de 9 voltios. El puente H es unarreglo de transistores que permiten que los motores DC conectados a sus salidas inviertan su giro dependiendo de los niveles logicos enviados por el PIC16F84A
PROGRAMACION
Para que este carrito pueda funcionar es necesario desarrollar la programación delmicrocontrolador realice las tareas que nosotros buscamos.En esta ocasión, la programacion se desarrollo bajo el lenguaje C, a traves delprograma MicroC de Mikroelectronika.
//Programa de robot seguidor de luz con motor DC en puente H////
void main(void)
{
TRISB=0; //Configura puerto B salidas//
leer_entrada: //Marcador//
//*********Motores detenidos*********//
if (PORTA==0 | PORTA==5) PORTB=0b00000000;
//*********Movimiento hacia la izquierda*********//
if (PORTA==1 | PORTA==3) PORTB=0b00001001;
//*********Movimiento hacia adelante*********//
if (PORTA==2 | PORTA==7) PORTB=0b00000101;
//*********Movimiento hacia la derecha*********//
if (PORTA==4 | PORTA==6) PORTB=0b00000110;
goto leer_entrada; //regresa a leer entradas//
}
Y.. tiene ya listo el circuito programado, es cuestion de montar en 4 ruedas y ya!!!
aqui les dejo un tutorial para realizar un robot sigue luz
LISTADO DE COMPONENTES A UTILIZAR
1 PIC 16f84A (Micro-controlador).
1 Integrado LM324N (op-amps).
4 Potenciómetros de 1KΩ
.5 Resistencias de 10KΩ
.4 Resistencias de 1KΩ
.4 Resistencias de 220Ω
8 Resistencias de 270 Ω
1 Oscilador de cristal de 4Mhz.
4 Leds.4 LDR (foto resistencias).
2 Capacitadores Cerámicos 33pf (33 pico faradios).
1 Capacitador Cerámico de 0.1µf
1 Pila de 9V.
2 Transistores darlington TIP122
2 Transistores darlington TIP126
4 Transistores TIP41
2 Transistores TIP42
PROCEDIMIENTO A SEGUIR
En este proyecto nuestra primera tarea fue investigar y recopilar toda lainformación posible acerca del funcionamiento del PIC 16F84A y la función de cadauno de los componentes del sistema para poder tener una idea clara de lo que sequiere hacer. Esta tarea se realizo durante las
primeras dos semanas
calendario.Durante la
tercera semana
, se realizo el protocolo del proyecto y así presentarlo demanera formal.Luego de su aprobación de esta propuesta de proyecto, en la
cuarta semana
abriremos paso a la compra de componentes que conforman el circuito ycomprobar si están en el mercado, de otra manera se procederá a lo más prontoposible a importar los dispositivos de países vecinos.A partir de la
quinta semana
iniciaremos la fase de estudio y desarrollo de nuestroproyecto. En esta semana se procederá con la programación del PIC para que así realice las tareas que nosotros le ordenemos.Previamente de montar el circuito en el breadboard, haremos uso del laboratoriovirtual
“Proteus” para verificar y analizar su funcionamiento, además corregiremos
posibles fallas y añadiremos algunas mejoras a nuestro circuito.Posteriormente, a partir de la
sexta semana
se procederá a armar el sistema en elbreadboard para verificar su funcionamiento de forma real.Llevaremos un calendario de actividades relacionadas con este proyecto para ir lo realizando por fases planeadas para que su culminación se realice en tiempo y forma.
CIRCUITO ELECTRONICO
Este proyecto de un sencillo pero ingenioso diseño con motores DC que soncontrolados por el microcontrolador 16F84A. Este sistema se encarga de verificaruna fuente de luz, en este caso usamos tres sensores de luz para posicionar entrederecha, adelante e izquierda. El 16F84A se encargara de analizar los niveleslogicos de cada etapa del sensor para asi procesar y enviar las ordenes a losmotores y lograr lo que se pretende, que es mover el carrito hacia la fuente de luz.A los niveles logicos de cada sensor, en conjunto, los veremos como una secuenciade tres bits y a cada combinacion, que son 8, le asignaremos una orden especificapara que el movimiento de la araña no presente ningun problema.
A continuacion se muestra una figura que muestra las ordenes de movimiento para cada combinacion logica:
Despues de que estas combinaciones sean analizadas en el PIC16F84A, se enviaranlas ordenes a los motores. Para que el carrito logre hacer cambio de giro yretroceder nesesitaremos de anexar una etapa de potencia y control de giro. Eneste caso utilizaremos un Puente H que se alimenta de 9 voltios. El puente H es unarreglo de transistores que permiten que los motores DC conectados a sus salidas inviertan su giro dependiendo de los niveles logicos enviados por el PIC16F84A
PROGRAMACION
Para que este carrito pueda funcionar es necesario desarrollar la programación delmicrocontrolador realice las tareas que nosotros buscamos.En esta ocasión, la programacion se desarrollo bajo el lenguaje C, a traves delprograma MicroC de Mikroelectronika.
//Programa de robot seguidor de luz con motor DC en puente H////
void main(void)
{
TRISB=0; //Configura puerto B salidas//
leer_entrada: //Marcador//
//*********Motores detenidos*********//
if (PORTA==0 | PORTA==5) PORTB=0b00000000;
//*********Movimiento hacia la izquierda*********//
if (PORTA==1 | PORTA==3) PORTB=0b00001001;
//*********Movimiento hacia adelante*********//
if (PORTA==2 | PORTA==7) PORTB=0b00000101;
//*********Movimiento hacia la derecha*********//
if (PORTA==4 | PORTA==6) PORTB=0b00000110;
goto leer_entrada; //regresa a leer entradas//
}
Y.. tiene ya listo el circuito programado, es cuestion de montar en 4 ruedas y ya!!!