mancoly
Usuario (Paraguay)
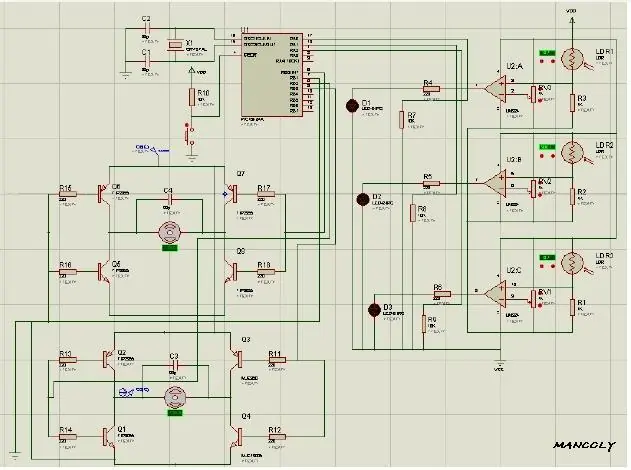
holas taringueros aficionados a la electronica.. aqui les dejo un tutorial para realizar un robot sigue luz LISTADO DE COMPONENTES A UTILIZAR 1 PIC 16f84A (Micro-controlador). 1 Integrado LM324N (op-amps). 4 Potenciómetros de 1KΩ .5 Resistencias de 10KΩ .4 Resistencias de 1KΩ .4 Resistencias de 220Ω 8 Resistencias de 270 Ω 1 Oscilador de cristal de 4Mhz. 4 Leds.4 LDR (foto resistencias). 2 Capacitadores Cerámicos 33pf (33 pico faradios). 1 Capacitador Cerámico de 0.1µf 1 Pila de 9V. 2 Transistores darlington TIP122 2 Transistores darlington TIP126 4 Transistores TIP41 2 Transistores TIP42 PROCEDIMIENTO A SEGUIR En este proyecto nuestra primera tarea fue investigar y recopilar toda lainformación posible acerca del funcionamiento del PIC 16F84A y la función de cadauno de los componentes del sistema para poder tener una idea clara de lo que sequiere hacer. Esta tarea se realizo durante las primeras dos semanas calendario.Durante la tercera semana , se realizo el protocolo del proyecto y así presentarlo demanera formal.Luego de su aprobación de esta propuesta de proyecto, en la cuarta semana abriremos paso a la compra de componentes que conforman el circuito ycomprobar si están en el mercado, de otra manera se procederá a lo más prontoposible a importar los dispositivos de países vecinos.A partir de la quinta semana iniciaremos la fase de estudio y desarrollo de nuestroproyecto. En esta semana se procederá con la programación del PIC para que así realice las tareas que nosotros le ordenemos.Previamente de montar el circuito en el breadboard, haremos uso del laboratoriovirtual “Proteus” para verificar y analizar su funcionamiento, además corregiremos posibles fallas y añadiremos algunas mejoras a nuestro circuito.Posteriormente, a partir de la sexta semana se procederá a armar el sistema en elbreadboard para verificar su funcionamiento de forma real.Llevaremos un calendario de actividades relacionadas con este proyecto para ir lo realizando por fases planeadas para que su culminación se realice en tiempo y forma. CIRCUITO ELECTRONICO Este proyecto de un sencillo pero ingenioso diseño con motores DC que soncontrolados por el microcontrolador 16F84A. Este sistema se encarga de verificaruna fuente de luz, en este caso usamos tres sensores de luz para posicionar entrederecha, adelante e izquierda. El 16F84A se encargara de analizar los niveleslogicos de cada etapa del sensor para asi procesar y enviar las ordenes a losmotores y lograr lo que se pretende, que es mover el carrito hacia la fuente de luz.A los niveles logicos de cada sensor, en conjunto, los veremos como una secuenciade tres bits y a cada combinacion, que son 8, le asignaremos una orden especificapara que el movimiento de la araña no presente ningun problema. A continuacion se muestra una figura que muestra las ordenes de movimiento para cada combinacion logica: Despues de que estas combinaciones sean analizadas en el PIC16F84A, se enviaranlas ordenes a los motores. Para que el carrito logre hacer cambio de giro yretroceder nesesitaremos de anexar una etapa de potencia y control de giro. Eneste caso utilizaremos un Puente H que se alimenta de 9 voltios. El puente H es unarreglo de transistores que permiten que los motores DC conectados a sus salidas inviertan su giro dependiendo de los niveles logicos enviados por el PIC16F84A PROGRAMACION Para que este carrito pueda funcionar es necesario desarrollar la programación delmicrocontrolador realice las tareas que nosotros buscamos.En esta ocasión, la programacion se desarrollo bajo el lenguaje C, a traves delprograma MicroC de Mikroelectronika. //Programa de robot seguidor de luz con motor DC en puente H//// void main(void) { TRISB=0; //Configura puerto B salidas// leer_entrada: //Marcador// //*********Motores detenidos*********// if (PORTA==0 | PORTA==5) PORTB=0b00000000; //*********Movimiento hacia la izquierda*********// if (PORTA==1 | PORTA==3) PORTB=0b00001001; //*********Movimiento hacia adelante*********// if (PORTA==2 | PORTA==7) PORTB=0b00000101; //*********Movimiento hacia la derecha*********// if (PORTA==4 | PORTA==6) PORTB=0b00000110; goto leer_entrada; //regresa a leer entradas// } Y.. tiene ya listo el circuito programado, es cuestion de montar en 4 ruedas y ya!!!
Los inyectores con bobinas suelen ser excitados desde la ECU, descargando la energía que previamente ha sido acumulada en un capacitor. El circuito interno de la ECU dispone de una fuente conmutada que eleva la tensión y mantiene cargado un capacitor que es luego descargado sobre el inyector. El circuito base, funcionamiento: La tensión de batería de 12 voltios es aplicada al circuito de la figura 1, el positivo llega a la bobina L1. El otro extremo de la bobina es conmutado a negativo por el transistor Q1 disparado a alta frecuencia desde el transistor Q2, (Mosfet), y su gate esta siendo excitado a alta frecuencia ( 5 a 25 Khz) con pulsos provenientes de un generador de onda cuadradas. Como consecuencia da la rápida conmutación a masa en el extremo de la bobina L1 se producen picos de tensión inducida que alcanzan los 80 votlios aproximadamente. Estos picos de tensión positivos y creados por la misma autoinducción de la bobina L1, pasan por el diodo D2 y se almacenan en el capacitor C1. Posteriormente esta energía acumulada en el condensador será enviada al inyector como se observa en la figura. El interruptor de la figura, se coloca a modo de análisis, al conectarlo y desconectarlo, se podrá observar el funcionamiento del inyector (SL1). La señal tiene la frecuencia de conmutación del generador que excita el gate de Q2. Este tipo de forma de onda será la que estimula a la bobina del inyector Common Rail bobinado.
Los servos son sin duda uno de los dispositivos mas útiles para cualquier aficionado a la robótica o que tenga de hobby el modelismo, ya que nos permiten crear toda clase movimientos de una forma controlada. En este tutorial vamos a mostrar como podemos utilizarlos como interruptor. A veces tenemos servos usados con engranajes rotos, y un canal libre de la radio, entonces podemos utilizarlos para encender leds o tiras de leds, también si necesitamos alguna otra aplicación podemos lograrlos con este sencillo, barato y eficaz circuito que sera añadido al circuito del servo. SERVO SWITCH Antes de iniciar necesitamos los siguientes materiales: 1 capacitor 3.3uf 1 transistor NPN 1 resistencia 330 ohm 1 Diodo rectificador Paso 1: Desarmar el servo con engranaje roto desoldar el motor Paso 2: montar el circuito en lugar del motor obs: medir la polaridad de la salida del circuito del servo antes de montar Paso 3: A configurar la radio y listo!!!