Buenas a todos!
Voy a tratar de ir sumando alguna data técnica para que podamos saber un poco mas de nuestras cámaras de foto digitales.
En este caso, empiezo con el sensor, una de las piezas mas importantes de la cámara digital.
Tipos de sensor y funcionamiento.
El sensor de imagen es el encargado de representar la luz (y su falta) que viene de la lente y que tanto nos preocupa a la hora de manejar.
Viene a reemplazar lo que años atrás (y aún hoy) era la película o film de celuloide con emulsión de haluros de plata.
Hay varios tipos de sensor, pero me voy centrar en dos: CCD y CMOS.

Los CCD fueron utilizados casi desde el principio en todo tipo de cámaras y en la actualidad quedaron relegados a las cámaras compactas, teléfonos celulares, cámaras de vigilancia y otros dispositivos donde no se necesita mayor calidad de imagen.
El sensor CCD debe su nombre a las siglas de Charged Couple Device o Dispositivo de carga acoplada y tiene la desventaja de consumir mucha energia y sobre-calentar fácilmente, lo que lo hace mas propenso a producir ruido (mas adelante cuento de que se trata) en las imágenes y a tener un menor desempeño en climas calurosos.
El sensor CMOS es el mas utilizado y el que mas campo de evolución tiene y debe sus siglas a Complementary metal-oxide-semiconductor o Semi-conductor complementario de óxido de metal. Es un sensor que otorga un rendimiento mayor en consumo de energía, calienta poco y genera mucho menor ruido en la imagen.
Detalle del sensor cara arriba

Cara abajo

Perfil

¿Dónde se ubica el sensor?
Está ubicado en la parte final de la montura de la lente (indiferentemente del tipo de cámara), por lo que delante de él se encuentra el obturador y el espejo (en réflex) y luego la óptica.
¿Cómo funciona el sensor?
El funciona reaccionando eléctricamente a la luz que ingresa. Cuanto mayor es la cantidad de luz que ingresa, mayor es la reacción eléctrica producida incrementando la señal.
La luz que llega al sensor, debe primero atravesar la óptica de la cámara. En algunas cámaras réflex (como algunos modelos de Sony) deben atravesar también el espejo SLT que es semi-transparente.
Luego debe seguir su recorrido y pasar por un filtro de paso bajo. Este filtro está formado, en general, por cuatro capas de cristal muy fino (por debajo de 0.5 mm) y cada uno cumple una función diferente y la función general se podría resumir en: hacer llegar al sensor una imagen sin defectos, polarizando la luz en forma lineal y circular, filtrando los rayos IR (Infrarojos) y los UV y aplicando un filtro anti-aliasing. El aliasing es un efecto indeseado por el cual algunas zonas de la imagen pueden verse distorsionadas produciéndose aberraciones como el moiré o bordes de serrucho. En algunas cámaras, como la Nikon 800E, el filtro anti-aliasing es retirado para lograr una mayor nitidez y contraste en la imagen, ya que el cristal anti-aliasing del filtro de paso bajo elimina distorsiones pero produce una imagen mas blanda (soft), es decir con menos nitidez y contraste.
Filtro de paso bajo visto de perfil a un aumento muy grande

Una vez la luz atraviesa el filtro de paso bajo, pasa por los microlentes y a través de ellos llega a los sensores eléctricos (fotodiodos) para luego pasar al microprocesador que digitaliza los datos y procesa cada punto (pixel) para devolver la imagen final.
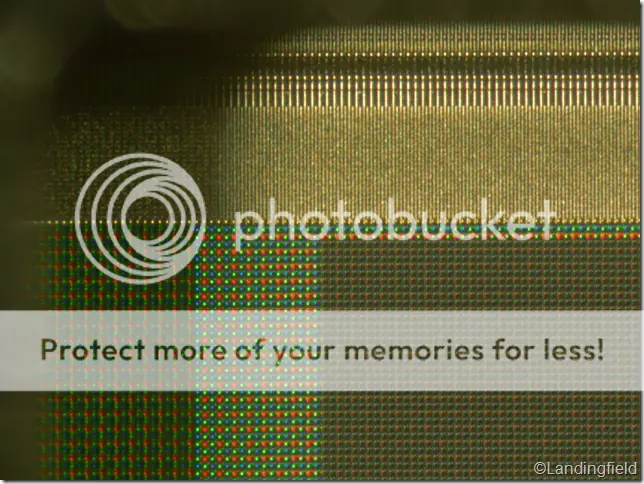
A continuación pongo unas imágenes del sensor CMOS de la Nikon D2H visto al microscopio con diferentes aumentos (de menor a mayor aumento)
Se pueden apreciar muy chiquititos los microlentes y el filtro RGB debajo, de ahí la coloración tornasolada (mas adelante hablo de este filtro)
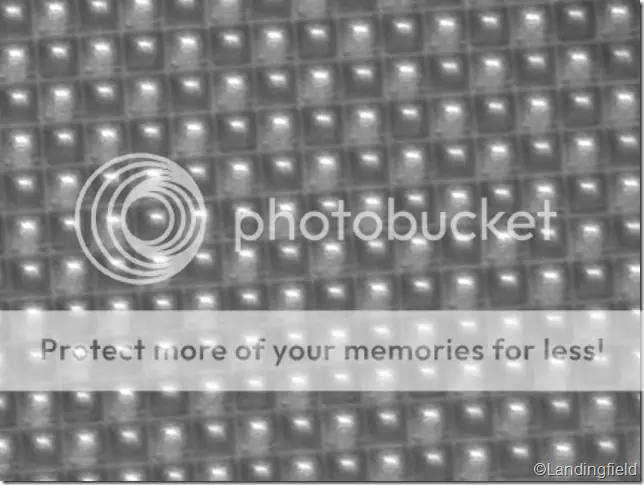
Aumentando un poco mas....
Y un poco mas aún, es importante recalcar que cada microlente que se ve aquí le otorga la luz a cada pixel!!
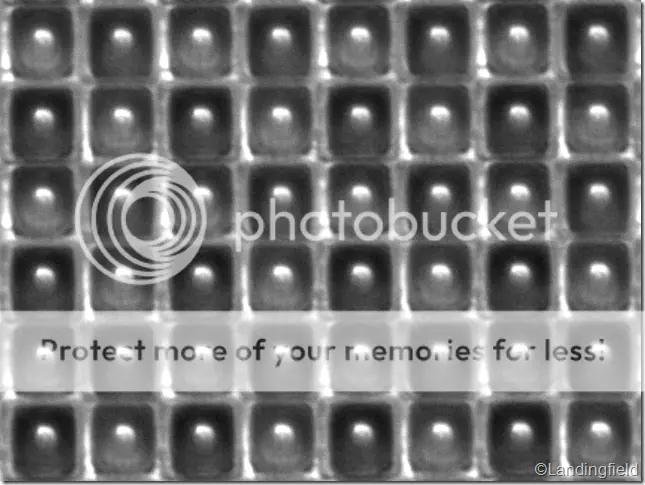
Es decir, que tenemos varias ópticas además de la conocida y palpable fuera. Por eso es que muchas veces es erróneo decir que lo que mas importa son los lentes, ya que en la cámara tenemos muchos componentes esenciales que hacen a la calidad final de la imagen. Ese dicho "los lentes son mas importantes que la cámara" quedó en el pasado, cuando el sensor de la cámara se cambiaba con cada rollo.
Tamaños de sensor
Los sensores son de diferente tamaño y están normalizados por un estándar de medidas que muestro a continuación, aunque muchas veces hay pequeñas variaciones de tamaño y supferficie de uso (mas adelante cuento por qué):
Tipo(pulgadas)- Ancho mm - Alto mm-
1/3.6"- 4.00- 3.00
1/3.2"- 4.54- 3.42
1/3"- 4.80- 3.60
1/2.7"- 5.37- 4.03
1/2.5"- 5.76- 4.29
1/2"- 6.40- 4.80
1/1.8"- 7.18- 5.32
1/1.7"- 7.60- 5.70
2/3"- 8.80- 6.60
1"- 12.80- 9.60
4/3"- 18.00- 13.50
APS C- 23.70- 15.70
35mm film- 36.00- 24.00
¿Es lo mismo tamaño del sensor que cantidad de píxeles?
NO. De hecho, actualmente los sensores mas pequeños del mercado suelen tener mayor cantidad de píxeles.
Para tomar el concepto hay que pensar que el sensor tiene una superficie sobre la cual incide la luz y cuanto mayor sea ésta mayor cantidad de información se obtendrá.
Si se parte de mucha información se puede procesar una mejor calidad. Es decir, cuanta mas información tenga para cada píxel, mejor se podrá resolver el contraste, el color y el rango dinámico por lo que se obtendrá una imagen mas limpia y libre de ruido.
Una imagen para ilustrar el tamaño del sector captador (pixel)
En la imagen superior, se establece una analogía entre la lluvia y unos cestos y la luz y los fotodiodos.
Por otro lado, cada sector sensible del sensor está separado por una pared del siguiente sector para evitar que se filtre luz parásita de un sector a otro, generando reflejos indeseados que producen una baja de contraste.
Por lo tanto, a mismo tamaño de sensor cuanto mas grande es el sector de captura mejor es la calidad de la imagen. A partir de allí, se podrá deducir fácilmente que un sensor de full frame (con el tamaño de la película 35 mm) tendrá mejor calidad que un sensor de tamaño APS-C con la misma resolución.
A continuación pongo una tabla de tamaños de sensor, tamaños de píxel (sector de captura de luz) y el ISO aproximado máximo con buen rendimiento
Sensor- tamaño pixel- ISO
1/2.5"- <1 micrón- n/a
1/1.8"- 1.4 micrones- 100
1/1.7"- 1.7 micrones- 100-200
cuatro tercios- 4.8 micrones- 320-800
APS-C- 5.7 micrones- 400-800
APS-H- 6.3 micrones- 800-1200
Full Frame- 8.4 micrones- 1000-3200
Resolución
Como ya se debe saber, la cantidad de píxeles de un sensor se mide en megapíxeles, es decir por unidades de millón píxeles. Por ejemplo, el sensor de la Nikon D200 que mide 23.6x15.8mm y tiene 10 megapíxeles o mejor dicho 10.000.000 de píxeles, tiene una resolución de 3872 píxeles de ancho x 2592 píxeles de alto. Entonces, si multiplicamos el ancho por el alto nos da 10.036.224 de píxeles.
Los sensores vienen equipados con mayor resolución, pero el área que se utiliza es menor. Un sensor de 10mpx generalmente tiene cerca de 11mpx reales.
El FOV o campo de visión
El campo de visión es la cobertura de imagen que tiene un sensor y se establece partiendo del estándar de 35 mm (24x36mm) al igual que las focales de las lentes para cámaras réflex.
Esto aplica únicamente en la práctica a las cámaras DSLR, compactas bridge y cuatro tercios.
Como los tamaños de los sensores, como hablé mas arriba, pueden variar dentro de un formato propio, siempre el fabricante de la cámara aclara el valor FOV (Field Of View o Campo de Visión) para poder calcular las focales de las ópticas a emplear. Los sensores full frame (24x36mm) tienen un valor FOV de 1, por lo que un lente de 50mm mantiene intacta su distancia focal nominal. En cambio un sensor APS-C, que equipa por ejemplo una cámara Nikon (generalmente marca Sony) tiene un valor FOV de 1.5. Esto indica que la focal de la lente, en el ejemplo 50mm, se deberá multiplicar por este valor dejando la distancia focal utilizable en 75mm (50x1.5=75)
Otros sensores, de Canon por ejemplo, utilizan valores FOV variables entre un modelo y otro de cámara y pueden ser 1.3x,1.6x o 1.7x.
Para explicarlo de mejor manera, lo que ocurre es que el círculo de imagen que provee la lente será aprovechado en proporción al tamaño del sensor. Si el sensor es full frame entonces aprovechará la mayor parte del círculo de imagen que le proyecta la óptica trasera de la lente y si es APS-C aprovechará una porción menor, por lo que en la práctica se producirá un "aumento" o acercamiento del sujeto debido a que se plasmará parte mas pequeña de imagen.
Una imagen de ejemplo donde se ve el círculo de imagen y dos FOV diferentes:
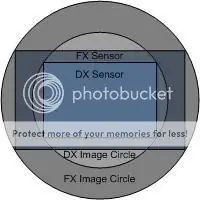
Pero esta característica técnica no es algo malo en algunas circunstancias. Por ejemplo, para los fotógrafos de deportes y naturaleza les conviene usar cámaras con sensores APS-C porque tienen buen rendimiento de colores e ISOs altos a la vez que permiten mayor acercamiento con lentes mas livianos (un 400mm se convierte en un 600mm por el valor FOV de 1.5x por ejemplo). Además, existen en el mercado ultra gran angulares con lo cual tampoco se pierden deliberadamente las focales pequeñas (gran angulares) y los lentes son sensiblemente mas baratos de fabricar para APS-C que para Full frame, debido a que no deben tener una calidad excelente de punta a punta porque de todas maneras el sensor no la aprovechará (por la porción del círculo de imagen). Además, los sensores mas pequeños son menos costosos de fabricar.
Sin embargo, los sensores Full frame tienen mejor calidad de imagen por su tamaño de pixel (hablado mas arriba), su bajo nivel de ruido a ISOS altos. Por contra, los sensores grandes son mas costosos de fabricar.
En general, los sensores mas grandes, independientemente de su cantidad de píxeles, generan archivos de imagen mas grande (porque contienen mas información.
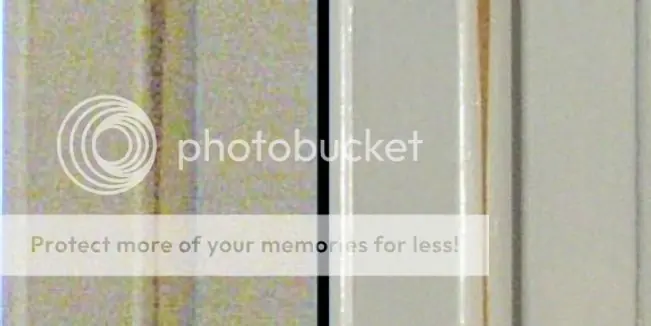
El ruido en la imagen
El noise (ruido en inglés) es un efecto indeseado que se produce en la señal del sensor y se manifiesta a través de puntos (píxeles) anómalos. El ruido puede manifestarse en forma de luminancia (en las zonas oscuras) o en forma de color (en zonas saturadas). A los ojos, se aprecian puntos similares a granos que difieren en calidad y cantidad de luz respecto de los píxeles con la señal no alterada. A veces pueden aparecer como puntos de un color diferente al resto de los píxeles circundantes. El ruido se puede generar de dos formas: una es mediante un uso intensivo del sensor, donde éste se calienta y produce estos píxeles "malos" (por ejemplo en exposiciones largas o en climas muy calurosos).
Y la otra es mediante el forzado del ISO. Todos los sensores tienen un ISO nativo, es decir una frecuencia a la que trabajan normalmente y bajo la cual brindan su mejor calidad. Cuando se eleva el ISO, se eleva la frecuencia en la que trabaja el sensor, haciéndolo mas capaz de obtener señal de una menor cantidad de luz ingresante. Los sensores tienen un margen de frecuencias en el que pueden desenvolverse adecuadamente sin mermar demasiado la calidad de la imagen (produciendo poco ruido, por ejemplo) pero una vez se salen de allí, las cosas comienzan a ir por mal camino. Se podría usar como analogía el volúmen de un parlante, el cual trabaja entre un mínimo y un máximo, y luego del cual comienza a vibrar demasiado y el sonido se modifica para mal.
En la imagen de abajo, se aprecia el marco de una puerta. En el cuadro de la derecha, una foto con poco nivel de ruido y en la de la izquierda ya con un ruido importante:
Obtención y procesamiento del color
El 99% de los sensores del mercado de las cámaras fotográficas poseen una forma indirecta de capturar el color.
La forma de guardar la información del color es mediante un filtro RGB que se ubica debajo de la capa de lentes. Este es el último filtro del sensor, y se encuentra pegado a los sectores de captación (fotodiodos).
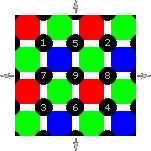
El patrón universal que se utiliza en este filtro RGB es llamado Bayer y tiene una disposición de filtros que abarca cada una de las lentes con un color diferente, combinando Rojo, verde y azul. El mosaico formado por este filtro, llamativamente, tiene 50% de color verde, 25% de color rojo y 25% de color azul.
Aquí se aprecia el patrón Bayer del filtro RGB
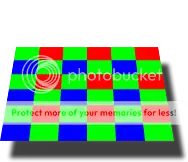
Como se puede ver, cada pixel rojo y cada pixel azul se encuentra rodeado por cuatro píxeles verdes.
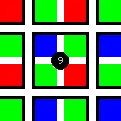
Si separamos cada canal RGB, el patrón queda distribuido de esta manera:
¿Por qué se usa el color verde en una proporción que dobla a los otros dos colores?
Porque está comprobado que el canal de color verde produce menos ruido y está mas relacionado con la capacidad de percepción de color del ojo humano y es mas fácil de procesar por el microchip y mas adaptable a los algoritmos de conversión.
Es decir, cada unidad de luz que ingresa por la lente ubicada sobre el sector de captación está cubierta por un solo color de acuerdo al patrón Bayer del filtro.
Entonces, ¿cómo se puede lograr una imagen con todos los colores si los píxeles tienen un filtro de color único y variable a lo largo del sensor?
Acá es donde entra en juego el poder de procesamiento de la cámara. Lo que se hace es utilizar un algoritmo de comparación entre la información de color de los pixeles circundantes (generalmente se toma un patrón de 4 píxeles, donde hay dos filtros verdes, uno rojo y uno azul) o bien en los mas avanzados se toman y promedian de 6 a 9 patrones cuádruples de píxeles promediando la información y asignando los tonos a cada píxel.
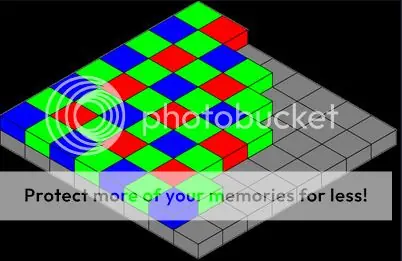
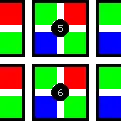
En la imagen de abajo se aprecia como actúa el filtro, donde el color que se encuentra sobre el pixel deja pasar únicamente la información de ese color que la luz que ingresa trae:
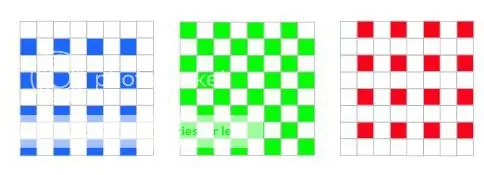
El sensor "ve" la imagen de la siguiente manera:

Donde la foto de la izquierda es el objeto como se vería con nuestros ojos y la foto de la derecha es la imagen vista por el patrón Bayer, que luego va a ser interpretado por el microprocesador de la cámara.
El modo básico de interpretar los colores para un píxel
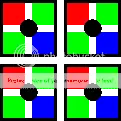
El modo avanzado
Región 1
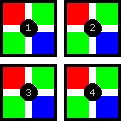
Región 2
Región 3
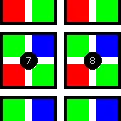
Región 4
Combinación de las 4 regiones
De modo que a los sensores muchas veces les cuesta reproducir algunos colores (sobre todo los rojos) y es por la adquisición indirecta de los mismos.
Existen diferentes formas y combinaciones de patrones Bayer. Por ejemplo algunos modelos de réflex Sony utilizan en su patrón, un color extra denominado verde esmeralda, logrando una tonalidad mas amplia y acertada del color real.
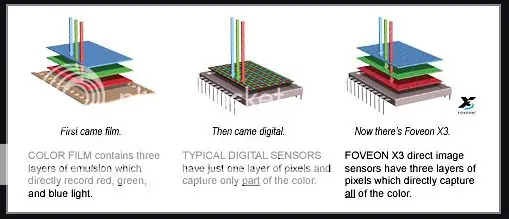
Pero hasta el momento, la mejor representación del color está en manos de los sensores Foveon de la firma Sigma. Esta tecnologia utiliza 3 capas de sensores, una para cada color (RGB) por lo que la captura de color es directa y las imágenes son muy ricas en tonalidad de color. Por desgracia, estos sensores son muy costosos de fabricar y el sistema de apilado de capas por el momento impide aumentar la resolución.
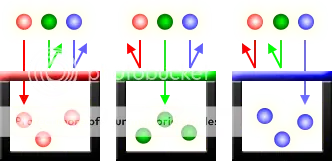
En la imagen de abajo se observan las adquisiciones de color de los 3 sensores mas conocidos:
en primer lugar, la película de celuloide (analógica) donde la emulsión contenía capas con metales sensibles a los distintos colores.
En la segunda imagen se ve un sensor de los mas usados, con el filtro RGB con el patrón Bayer
Y en la tercer imagen se aprecia el innovador filtro RGB de Foveon, donde cada capa obedece a un color primario diferente.
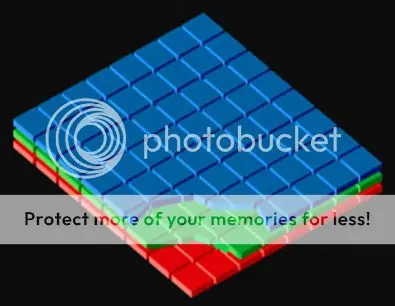
Las capas de un Foveon en detalle:
Profundidad de bits
Un bit es un valor digital que se compone de un 0 y un 1. A partir de allí, la combinación de esos 0 y 1 indica la cantidad de información diferente que se puede obtener.
Los sensores de mayor calidad tienen la habilidad de recojer entre 12 y 14 bits por cada color, por lo que tienen 36 y 42 bits por canal. Como expliqué mas arriba, cada canal de información de pixel está formado por tres colores principales (RGB) así que cada color dispone de 12 o 14 bits de información. Dije que cada bit contiene un 0 y un 1, es decir que tiene un espacio de 2 unidades. Por lo tanto, si tenemos un espacio de 2 bits, tenemos cuatro combinaciones de 0's y 1's posibles, o sea 2x2 o 2 al cuadrado. A medida que aumentamos la cantidad de bits, aumentamos la cantidad de combinaciones y con ello ganamos espacio de tonalidades de color. Para un sensor de 12 bits tenemos 2 a la 12 (o sea, multiplicar 12 veces el resultado de 2x2) lo que da 4096 tonos para cada uno de los tres colores principales R (rojo), G (verde) y B (azul) y tendemos un espacio total por canal (pixel) de 12288 tonos. Si el sensor posee 14 bits, la gama tonal se expande notablemente ya que como el aumento de combinaciones de 0's y 1's no es lineal sino exponencial, se gana muchísima mas profundidad de color, lo cual es mejor a la hora de ajustar luces y sombras, saturar colores, reducir ruido, etc. Un sensor de 14 bits por canal es capáz de reproducir una cantidad de 16384 por color dando un total de 49152 tonos por pixel. Buena diferencia entre 14 y 12 ¿no?
Y para finalizar, les pongo un video donde en apenas unos minutos se puede hacer un recorrido visual del funcionamiento básico de un sensor y demás componentes para obtener la imagen:
Esto ha sido todo.
Desde el lado técnico electrónico-óptico hay muchas cosas que falta explicar, pero sería embarrar demasiado el tema y me metería en asuntos de los que no comprendo mucho.
Se aceptan todo tipo de comentarios, sugerencias y correcciones al tema.
Muchas gracias por leer!
Diego
Fuentes:
Mi conocimiento y experiencia e info recabada de estos sitios, entre otros:
http://www.petapixel.com/2013/02/12/what-a-dslrs-cmos-sensor-looks-like-under-a-microscope/
http://www.donaldgrigley.com/blog/2012/3/basic-understanding-of-bayer-and-foveon-x3-sensors
http://www.anandtech.com/show/2507/6
http://www.cambridgeincolour.com/tutorials/camera-sensors.htm
http://www.sensor-film.com
https://nikoneurope-es.custhelp.com
http://www.clarkvision.com
http://www.adorama.com
http://www.sergeydrobkov.com/2012/01/hacer-fotos-en-14-bits-mejora-las.html