juanjojjjj
Usuario (España)
MACH 3 CARACTERÍSTICAS Convierte un PC estándar con un completo control de CNC. Hasta 6 ejes de control de CNC Permite la importación directa de archivos DXF BMP JPG y HPGL. Visual G-Code pantalla Genera código G Control de velocidad del husillo Múltiple de control de relé Manual de generación de pulsos Incluye varios asistentes Pantalla de vídeo de la máquina Toque la capacidad de la pantalla Elegibilidad de pantalla completa Digitalización MUCHO MUCHO MÁS CONTROLADA POR MACH3 Tornos Mills Routers Los láseres Plasma Grabadores Corte del engranaje Otros ASISTENTES GRATIS INCLUIDO Corte del engranaje Digitalización Agujeros Las ranuras y chavetas Texto grabado Muchas formas estándar Revestimiento MUCHOS MÁS Otros asistentes de los proveedores de terceros descarga:Aqui contraseña winrar: www.libertad Enlace:los enlaces se an cambiado por que tenian un problema, perdonad por las molestias. ya esta ok.si cuando bajeis el archivo aparese sin formato le dais a que lo abra con winrar y listo.todo esta incluido en la carpeta de descarga ,incluso la instrucciones de instalacion.espero que sea de utilidad y si teneis alguna duda preguntad.y si os hace falta algo mas relacionado con el mundo del cnc no dudeis en pedirlo ya que yo trabjo en ello y tengo muchas cositas.gracias
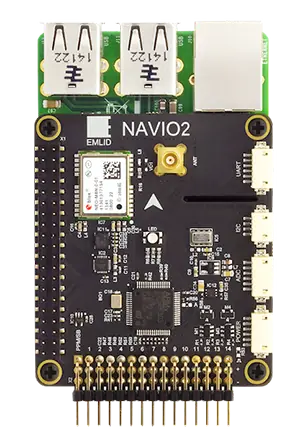
Bueno aquí presento esta controladora que estoy utilizando en varios proyectos. Es una controladora basada en raspberry pi con un escudo de sensores y con firmware que pixhawk. Toda la información está AQUÍ . Dejare un pequeño tutorial para que la instalación sea un poco menos complicada para los que nunca utilizaron raspberry. Tendremos que descargar estos 3 programitas; SDFormatter.exe (Formatear SD) Win32DiskImager (Escribir imagen en la micro sd) putty . (consola para interactuar con raspberry remotamente) 1.Descargamos imagen de navío AQUI . 2.Formateamos la sd con SDFormatter. 3.Abrimos Win32DiskImager como administrador y seleccionamos la imagen descargada en el punto 1 dando a escribir. 4.Cuando termine metemos sd en nuestra raspberry, conectamos con cable de red a nuestro rúter y alimentamos. 5.Con el programa Fing para Android vemos la ip de la raspi. 6.Abrimos el putyy y ponemos la ip de la raspi y conectamos a consola . 7.En usuario ponemos pi y en contraseña raspberry. 8. Entrad en el repositorio (intalacion) y descargarlos y descomprimir. 9.Tenemos 3 opciones de instalación; navío + , navio2 con estable, navío de con beta. 10.Con el archivo descargado en el punto 8 seleccionamos el txt de la opción que queramos instalar. 11.Copiamos el contenido y lo pegamos en la consola de que abrimos con putyy y le damos a intro. Pues ya automáticamente instala ardupilot y todos los scripts de mi repositorio. Al reinicio ya tendremos funcionan navío totalmente operativo con lo siguiente: •Ardupilot con inicio automático en arranque. •Video fpv a1080 con gstremer y por wifi tanto al móvil como a pc con Windows o Linux. •Medir temperatura de procesador y guardar por fecha y hora. •Telemetría y video por wifi en 5g. •Telemetría tradicional de ardupilot(puedes utilizar esta y la de wifi a la vez) •Ya iré añadiendo más cositas que aún tengo en beta. La ip del navío es fija y por lo tanto en el punto de acceso u rúter que utilicemos para hacer puente entre navío y ordenador o móvil tendremos también que poner por ip fija. En la instalación automática el vehículo que tiene es y6, para otros vehículos solo tenéis que cambiar en el script de esta manera. 1.Estando en la consola de putyy escribir lo siguiente. (cada cabio de línea es un intro) cd cd /home/pi sudo nano ardupilot 2.Se abrirá lo siguiente #!/bin/sh IP=192.168.1.150 PORT=14550 PROTOCOL=udp ArduCopter-y6 -C /dev/ttyAMA0 -A $PROTOCOL:$IP:$PORT > /home/pi/ArduCopter-y6.log Para cambiar el vehículo solo tendréis que cambiar “ArduCopter y6 por ejemplo por ArduCoter-quad. En la página de EMLID tenéis más información. La instalación anterior ya trae todos los vehículos incluidos. Pagina wed del repositorio: Pagina de github: https://github.com/5jjCopter AQUÍ tenéis videos en mi canal de YouTube para que sea más fácil. Saludos y aquí estamos
Última imagen DESCARGAR AQUÍ https://github.com/befinitiv/rpi_wifibroadcast_image_builder/releases/download/v0.4/2015-09-24-raspbian-jessie_2015-12-31.zip Mi bloc donde pondré este y otros proyectos. http://www.5jcopter.es/ Y mi canal de YouTube. link: https://www.youtube.com/watch?v=iF-gMjUIrZM Como dice el titulo, quiero compartir con vosotros el trabajo de algunas personas de la comunidad de raspberry y el mio propio para que disfrutéis de esta trasmisión de vídeo. Lo primero es dar las gracias a BEFINITIV que es el creador de este proyecto. Yo por mi parte he trabajado en muchas partes y sobre todo en poder utilizar wifi en 5.8 que en su proyecto aun no lo ha conseguido. Se trata de un sistema de trasmisión de vídeo por wifi en modo monitor. Las ventajas del modo monitor es que la raspberry de aire lanza paquetes de video sin tener que tener una asociación wifi ,la raspberry de tierra recoje dichos paquetes. Por lo tanto no hay desconeccion de wifi y lo que notaríamos seria perdida de FPS, pero no tendríamos desconeccion del wifi. Con este sistema podremos tener video hd a 60 fps para nuestro fpv. Ahora paso a detallar todo los que nos hace falta. 1. 2 x Raspberry pi a+....b+...pi 2b. 2. 1 x Cámara de raspberry pi. 3. 2 x pinchos usb dual banda(de momento tienen que ser estos, ya actualizare cuando acabe los scripts de otros pinchos mas potentes). 4. 2 x Micro sd clase 10 (si son de mas de 8Gbt mejor). Ahora la parte de software. Tenéis que descargaros los siguientes programas. 1. Win32DiskImager. 2. SDFormatter V2.0 Ahora tendremos que descargar esta imagene de disco. 1. https://github.com/befinitiv/rpi_wif...2015-12-31.zip Procederemos con la instalación. Primero formatearemos las micro sd con SDFormatter V2.0. Después abrimos el programa Win32DiskImager con derechos de administrador. Conectamos nuestra microsd que sera la misma imagen tanto para tx como rx. Detecta automáticamente cual es cada uno. En el Win32DiskImager le damos a escribir. Cuando termine le daremos a extraer la micro sd con seguridad y listo. Realizaremos el mismo paso con la imagen RX. Ahora cogeríamos la raspberry de aire o TX le pondríamos la cámara , le conectaríamos el pincho wifi y por esta parte estaría listo. En la raspberry de tierra o RX pondremos la microsd de de la raspi mas el pincho wifi y conectaríamos a una pantalla. Simplemente con alimentar las 2 ya funcionaria el sistema de vídeo. Para grabar video, cuando la raspi rx arranque con memoria usb conectada empezara a grabar vídeo. si no esta conectada la memoria usb se desconectara la grabación de vídeo automáticamente. Actualización apagado automático. Conectamos un pulsador entre el pin 22 y pin 17=3.3v Conectamos una resistencia de 10k entre pin 22 y pin 20=gnd. Pulsar más de 2 segundos para que la raspi se pague automáticamente. Enlace al proyecto BEFINITIVhttps://youtu.be/iF-gMjUIrZM