
Bienvenidos A Mi Nuevo Post Sobre Como Hacer Una Plata Forma Para La Computadora Y Hacer Que Se Mueva
Así Te Podría Quedar (Claro... Con Una Laptop)

Una computadora es una cosa muy útil para utilizar en sus robots.
Si usted comienza a enumerar todos los rasgos que pueden ser utilizados con fines robótica usted encontrará que es más barato comprar un netbook que la compra de LCD, wifi y módulos Bluetooth, cámaras, módulos de sintetizador de voz, teclados, lectores de tarjetas de memoria, altavoces y muchas otras cosas.
Es por eso que decidí hacer esta plataforma para mi netbook. Para que el control de la computadora del motor, traté de dos maneras diferentes: En primer lugar he usado un Duemilanove Arduino con dos tablas de controlador de motor , pero luego me pareció que sería mucho más fácil si sólo utiliza un motoruino .
Con esto podría crear un montón de aplicaciones diferentes que permiten a mi equipo siga ciertos colores, siga los rostros humanos, detectar las llamas, la unidad alrededor de la casa evitando las paredes, ser accionado por control remoto a través de Internet o usar un wiimote, y la lista de posibilidades es casi interminable .
Éstos son manifestaciones de dos de ellos:
Paso 1 Reunir los materiales
Esto es lo que necesitas:
- Caja 1x
- Motores de 2x, ruedas y soportes
- En tercer lugar la rueda 1x
- 1x Batería
- Algunos cables y puentes
Y ...
Si usted decide usar la motoruino también necesitará:
- 1x Motoruino
- Cable FDTI 1x
... O ...
Si prefiere el arduino se necesita:
- Arduino 1x
- 1 x USB Cable de A / B
- 2x Controladores de Motor, he utilizado estos .
Paso 2 Prepare la caja
Vamos a preparar el cuadro para adaptarse a nuestras necesidades:
Cortar los agujeros que usted necesita para el cable USB y para las ruedas.
yo calenté un cuchillo en la cocina para hacer eso fácilmente, y era como cortar mantequilla.
Paso 3 Coloque las ruedas
Coloque las ruedas en los centros de los motores y apretar sus tornillos.
Adjunte también la tercera rueda en su lugar.
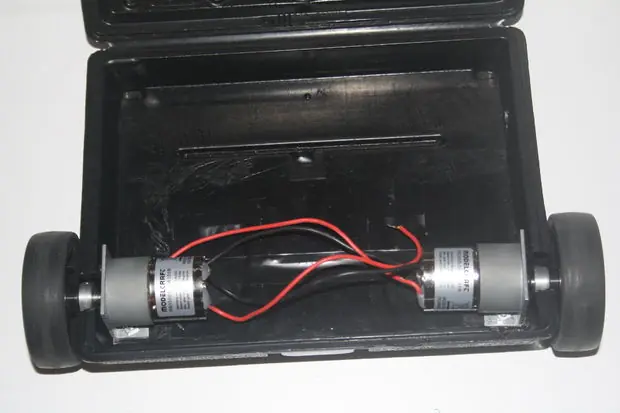
Paso 4 Coloque todo dentro de la caja

Si utiliza el motoruino tienes que conectar los cables de los motores y la batería a los terminales de tornillo respectiva.
Si tiene dudas consulte esta página: http://www.guibot.pt/using-the-motoruino/ . (Esta En Ingles)
Entonces usted tiene que conectar el cable USB, si está usando uno con el chip FTDI incrustado solo tiene que conectarlo dirrectly a la junta, si usted está usando una tarjeta del adaptador, como me lo puso en su lugar y conectar el cable USB a la misma.
Asegúrate de que estás conectando de la manera correcta, usted puede tener que conectarlo boca abajo.
Si decidió utilizar mis tablas, conecte los cables de la batería y los motores a las juntas del motor regulador, ya que se muestran en las imágenes.
Conecte el 5V del Arduino a las juntas, y los puentes que vienen de las salidas PWM de la Arduino.
Son dos para cada motor a ser posible controlar la velocidad de la rotación en ambos sentidos de giro.
Si el uso de controladores de otros, verificar la hoja de datos
Paso 5 Sube el boceto para el Arduino
Descargar el archivo adjunto, abrirlo con el software de Arduino , leerlo si lo desea, elegir el puerto serie y la junta, y subirlo a la junta.
LInk
Paso 6, se prueba!
Abra la ventana del monitor de serie y ver qué pasa al enviar los siguientes comandos:
- 'W' avanzar
- 'S' retroceder
- 'A' giro a la izquierda
- "D" de selección para la escritura
- 'G' stop
Paso 7 Abra su imaginación!
Ahora que usted tiene su plataforma de trabajo, empezar a crear aplicaciones para ella!
He creado algunos de ellos con el procesamiento , que es una lengua muy fácil de aprender, especialmente lo que ya sabes cómo programar en Arduino.
Puede echar un vistazo y descargar aquí: http://www.franciscodias.net/processing-applications
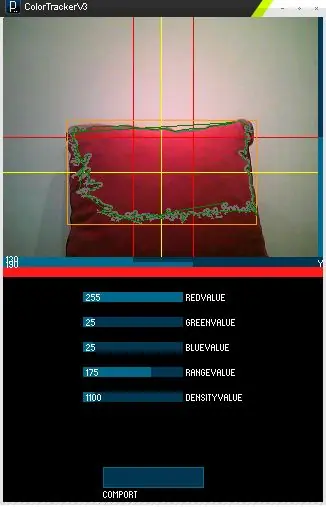
Recuerde siempre comprobar el puerto disponible de serie en el equipo, en mi caso es COM19, pero esto es diferente de un sistema a otro.
Aquí está otra vez la manifestación del color de seguimiento de uno:
Fin: Quisiera decir que lo hice yo pero no es así
Intructables.com