RESUSITA TU FURBY
Hay varios sitios que documentan el original tablero de circuito de Furby. Decidí sustituir el circuito original por completo y reemplazarlo con un controlador basado en PIC.
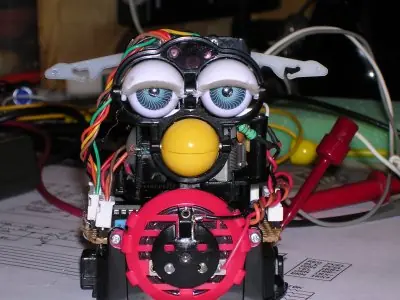
El mecanismo del propio Furby fue diseñado alrededor de micro-controladores. Tiene un motor que funciona a los ojos, boca y oídos en secuencia. Dos sensores son proporcionados por el sistema de servo motor: una cuenta de alrededor de 200 pulsos por toda la secuencia, el otro es un pulso 'index' que te permite encontrar el inicio / final de la secuencia.
Varios otros sensores se proporcionan incluyendo varios interruptores, sensores de infrarrojos, un sensor foto, y el micrófono. Las salidas están en el sistema de infrarrojos, el motor, y el altavoz.
El Proyecto ....
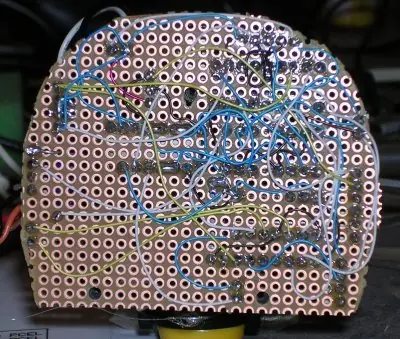
Una placa de circuito se redujo a un tamaño y forma de la placa original. Debido a limitaciones de espacio, wirewrapping no era posible. Punto a punto cableado con piezas recortadas de cable # 30 se hacía a mano.
Los usos circuito básico - microcontrolador PIC16F819, FAN8200 H-Puente (conductor del motor), EEPROM 24LC256 de serie (para las muestras de audio), MCP41010 potenciómetro digital (utilizado como 8-bit D / A), el conductor del altavoz LM386, IR LED (para el tacómetro sensor), y un interruptor de inclinación de mercurio al movimiento sentido.
El software actual es rudimentry en este momento y se facilitará más adelante. Hasta ahora, la unidad de motor, sensor de tacómetro, sensor de índice, interruptor de inclinación, eeprom de sonido y sistema de audio han desprotegido. Este es uno de los proyectos en curso para ver qué tan inteligentes (raro), este equipo puede llegar a ser.
comenta no cuesta nada
.
Hay varios sitios que documentan el original tablero de circuito de Furby. Decidí sustituir el circuito original por completo y reemplazarlo con un controlador basado en PIC.
El mecanismo del propio Furby fue diseñado alrededor de micro-controladores. Tiene un motor que funciona a los ojos, boca y oídos en secuencia. Dos sensores son proporcionados por el sistema de servo motor: una cuenta de alrededor de 200 pulsos por toda la secuencia, el otro es un pulso 'index' que te permite encontrar el inicio / final de la secuencia.
Varios otros sensores se proporcionan incluyendo varios interruptores, sensores de infrarrojos, un sensor foto, y el micrófono. Las salidas están en el sistema de infrarrojos, el motor, y el altavoz.
El Proyecto ....
Una placa de circuito se redujo a un tamaño y forma de la placa original. Debido a limitaciones de espacio, wirewrapping no era posible. Punto a punto cableado con piezas recortadas de cable # 30 se hacía a mano.
Los usos circuito básico - microcontrolador PIC16F819, FAN8200 H-Puente (conductor del motor), EEPROM 24LC256 de serie (para las muestras de audio), MCP41010 potenciómetro digital (utilizado como 8-bit D / A), el conductor del altavoz LM386, IR LED (para el tacómetro sensor), y un interruptor de inclinación de mercurio al movimiento sentido.
El software actual es rudimentry en este momento y se facilitará más adelante. Hasta ahora, la unidad de motor, sensor de tacómetro, sensor de índice, interruptor de inclinación, eeprom de sonido y sistema de audio han desprotegido. Este es uno de los proyectos en curso para ver qué tan inteligentes (raro), este equipo puede llegar a ser.
comenta no cuesta nada
.