Estos experimentos los podes hacer en tu casa, la mayoría de los materiales están tirados por ahí, o en mejor caso "guardados"

COHETE
funca con hidrógeno
Después de ver cohetes en Internet que funcionan con hidrógeno, como no quería gastar plata me hice uno yo, este era el cohete que intente hacer...

El ignitor es un simple alambre de nicromo; el hidrógeno se consigue por electrolisis del agua en un tubo que luego se enciende por medio del alambre de nicromo. Pero en nuestro cohete la ingición será con una chispa de alto voltaje.
El cohete en si y todo los demás se hace con tubo de PVC y láminas de plástico. Para el cono es recomendable usar una punta suave (plastoform) para evitar accidentes.

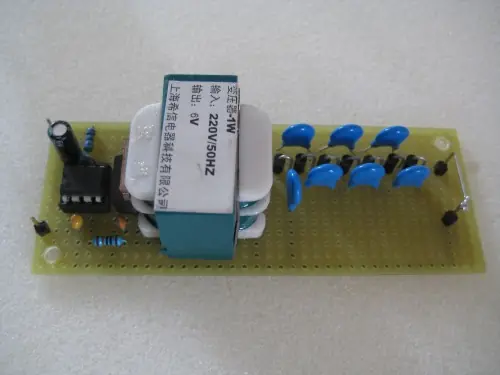
Arriba se puede ver que se ha usado un circuito multiplicador de voltaje para poder obtener la chispa. Se lo puede obtener de una cámara fotográfica desechable que tenga flash. También se puede usar un ignitor tal como el que vemos en nuestro Catalogo . Este último es mucho más fácil de usar en el cohete.
El agua que se coloca en la base del cohete se separa en dus dos componentes principales (electrólisis) hidrógeno y oxígeno, por medios de dos electrodos. Estos electrodos son simples barritas de carbón mineral obtenidos de pilas.

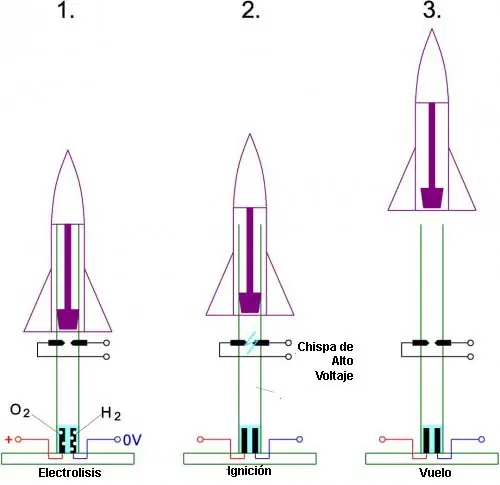
En el dibujo de arriba se puede ver el principio de funcionamiento del cohete con combustible de hidrógeno.

Arriba se puede ver la base donde se coloca el agua para la electrólisis y el circuito para hacer la chispa dentro del tubo.
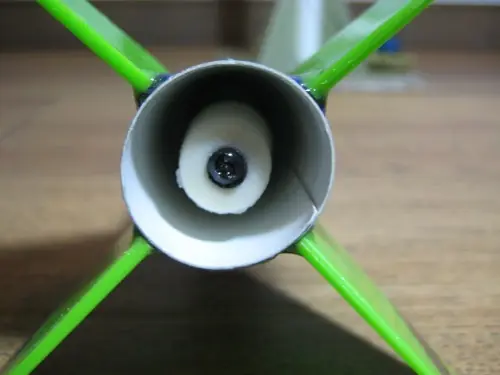
Como se ve en la foto de arriba, el cohete tiene en su interior un émbolo que se introduce en el tubo del lanzador o base. Cuando se logra la electrólisis del agua, se acumula en el interior del tubo de lanzamiento hidrógeno y oxígeno. Al hacer saltar la chispa en estos gases se produce una especie de explosión que dispara al cohete a una altura considerable. En realidad no es un cohete porque no tiene propulsión propia, sino que se lo clasifica como un proyectil.
MANO ROBOTICA (GRIPPER)
*Para hacer esta mano robótica (gripper) simplemente se usaron materiales que estaban a la mano.
*Actuadores: un servomotor con dos salidas o brazos.
*Actuadores: un servomotor con dos salidas o brazos.
Un sencillo robot con oruga necesitaba una mano que pudiera tomar cosas. Las manos de los robots se conocen como "grippers".
El gripper de mi robot sólo debe tomar objetos y el robot los mueve de un lado a otro. Esto hace que la construcción se simplifique.
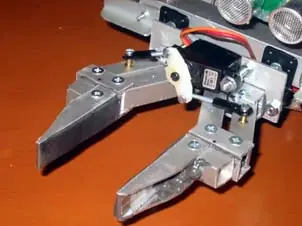
La distancia máxima en que puede abrir los dedos es de unos 60mm. Los dedos simpre estarán paralelos con el diseño que se muestra. Como se ve cada dedo tiene un par de brazos que están separados una distancia de 4mm lo que les permite moverse a 45° . El Servomotor se conecta usando tornillos y un pequeño tubito separador.

La parte interna de los dedos tiene unas cintas de neopreno que impiden que la mano haga mucha presión sobre los objetos que toma.
Vista de abajo
Vista de abajo
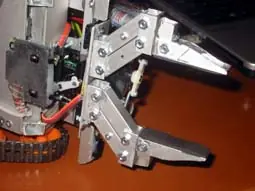
Como se ve arriba, ambos conjuntos de brazos se sujetan a una placa de aluminio. Esta placa se sujeta a su vez a la base del robot.
El material que se usó es aluminio y perfiles de aluminio.
Es posible usar diferentes materiales y perfiles.
En este gripper se usaron perfiles cuadrados de 10x10 mm y perfiles en forma de U de 12x10
El material que se usó es aluminio y perfiles de aluminio.
Es posible usar diferentes materiales y perfiles.
En este gripper se usaron perfiles cuadrados de 10x10 mm y perfiles en forma de U de 12x10
HOVERCRAFT

El Hovercraft , también llamado Aerodeslizador, es un vehículo que se mueve sobre la superficie del agua o sobre la tierra; se sostiene sobre un colchón de aire de 1,2 a 2,4 m de grosor. El colchón de aire se consigue gracias a un ventilador de gran tamaño que empuja el aire hacia abajo en el interior de unas paredes flexibles que rodean el perímetro del vehículo. El movimiento hacia adelante se realiza mediante propulsores montados sobre el vehículo o mediante el control de la salida del aire a través de pequeñas aberturas que rodean las paredes. Los frenos se controlan invirtiendo el paso del propulsor o cambiando el sentido del flujo de aire que pasa por los respiraderos de las paredes. Este fenómeno se conoce también en aerodinámica como efecto suelo
MATERIALES
Motor pequeño de CC -Helice de plástico - Bandeja de plastoform (telgopor) - Cartón de un paquete de cerales - Cinta adhesiva - Batería de 9 voltios - Alambre de conexión delgado y flexible - Tijeras - Cuchilla
COMO SE HACE
Primero se corta del cartón una figura como se ve en la fotografía. Esta sirve para dirigir hacia abajo el flujo de aire que produce la hélice al funcionar.
Luego cortamos un cuadrado en el centro exacto de la bandeja de plastoform. En este cuadrado se deberá colocar la forma de cartón que hicimos anteriormente.
Ahora tomamos la hélice y el motor y colocamos esta primera en el eje de este último. Podemos sujetar con ayuda de pegamento.
Soldamos dos cables a los terminales del motorcito. Estos cables deben ser luego conectados a la batería de 9 voltios, de modo que es buena idea usar un conector para batertía de 9 v.
Finalmente colocamos el motor sobre la forma de cartón y nos fijamos que esté en el centro exacto.
Igualmente colocanos la batería de 9 voltios y hacemos funcionar la hélice, si todo va bien el hovercraft se levantará unos milímetros sobre el suelo y comenzará a desplazarse hacia adelante. En caso contrario hay que revisar que todo esté perfectamente centrado.
Si el conjunto es muy pesado para que el aparato se levante, se puede conectar una fuente de poder (pilas, batería de 9 voltios, adaptador,etc.) con ayuda de unos cables largos, tal como se ve en la fotografía de al lado.

ROBOT CAMINANTE 1 MOTOR
Este es un proyecto relativamente simple, se trata de un robot tipo walker, es decir que camina sobre cuatro patas al igual que un insecto, es por eso que se catalog como robot BEAM. Este robot se basa en uno similar diseñado por el canadiense Jérôme Demers y tiene las siguientes características:
Sigue el principio K.I.S.S. ("Keep It Simple, Stupid" del inglés Que Sea Simple y Estúpido). Este robot usa usa un circuito de control simple, un solo servomotor, y un solo engranaje para crear un caminante de cuatro patas.
Se demuenstra el uso de un popular circuito, el BEAM Bicore un circuito timer de dos nodos que envía una señal de control hacia atrás y adelante entre los nodos creando un movimiento adelante y atrás en el motor y los engranajes y por tanto a las patas de alambre sujetas a los engranajes.
Sigue el principio K.I.S.S. ("Keep It Simple, Stupid" del inglés Que Sea Simple y Estúpido). Este robot usa usa un circuito de control simple, un solo servomotor, y un solo engranaje para crear un caminante de cuatro patas.
Se demuenstra el uso de un popular circuito, el BEAM Bicore un circuito timer de dos nodos que envía una señal de control hacia atrás y adelante entre los nodos creando un movimiento adelante y atrás en el motor y los engranajes y por tanto a las patas de alambre sujetas a los engranajes.
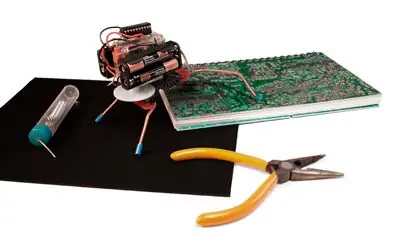
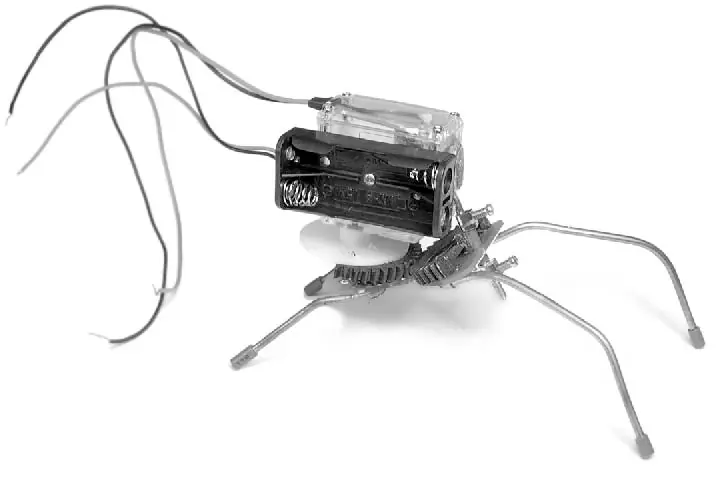
FIGURA 1: COMO SE VE EL ROBOT UNA VEZ TERMINADO Y FUNCIONANDO
MATERIALES
Este proyecto requiere materiales que no se encuentran en la casa a no ser por el alambre que se obtiene de un colgador de ropa. Todo lo demás se debe comprar en una tienda especializada en electrónica
LISTA DE PARTES
(1) Servo motor de una tienda de hobby
(1) Engranaje de plastico de 4cm
(1) 30 cm de alambre de un colgador de ropa o alambre de cobre No 10
(1) Tubo de plastico de 1cm de diametro se puede usar el plástico del alambre de colgar ropa
(1) Bloque de terminales
(2) Portapilas para pilas AAA cada una para dos pilas
(1) Trozo de tubo de 1cm diametro
(2) .22 µF capacitores monoliticos
(1) 100K a 10M? resistor (usamos uno 3.2M)
(1) Circuit integrado 74HCT240 (IC)
(1) socket de 20-pines DIP IC
CONSTRUCCION EN FORMATO LIBRE
Usaremos el circuito intergado 74HCT240. ESte chip es un buffer octal inversor. Es decir que es un chip con ocho compuertas logicas que invierten las señales que les llegan. Todo se invierte, entonces una señal baja se vuelve una señal alta y una señal alta se vuelve una señal baja. Al combinar las tres compuertas en un lado y las tres del otro lado (soldando los pins o patitas del chip). la señal que pasa hacia atrás y hacia adelante entre los dos nodos envía pulsos altos y bajos (o “on” y “off”) a nuestro servo motor. El resultado es un movimiento oscilatorio del eje del motor que se transminte a los engranajes y de estos a las patas hechas de alambre grueso.
En la foto se puede ver el circuito construido en un breadboard se usan capacitores de .22µF.
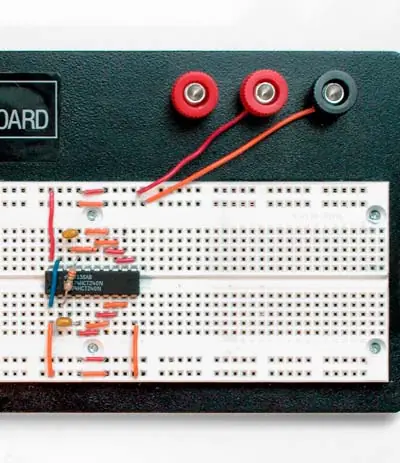
FIGURA 2: El circuito totalmente terminado, no se muestran las terminales de los motores.
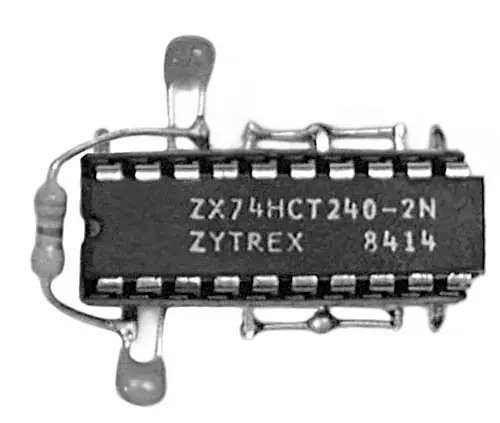
FIGURA 3: Circuito terminado en formato libre y listo para ser usado.
COMO SE CONECTAN LOS PORTAPILAS
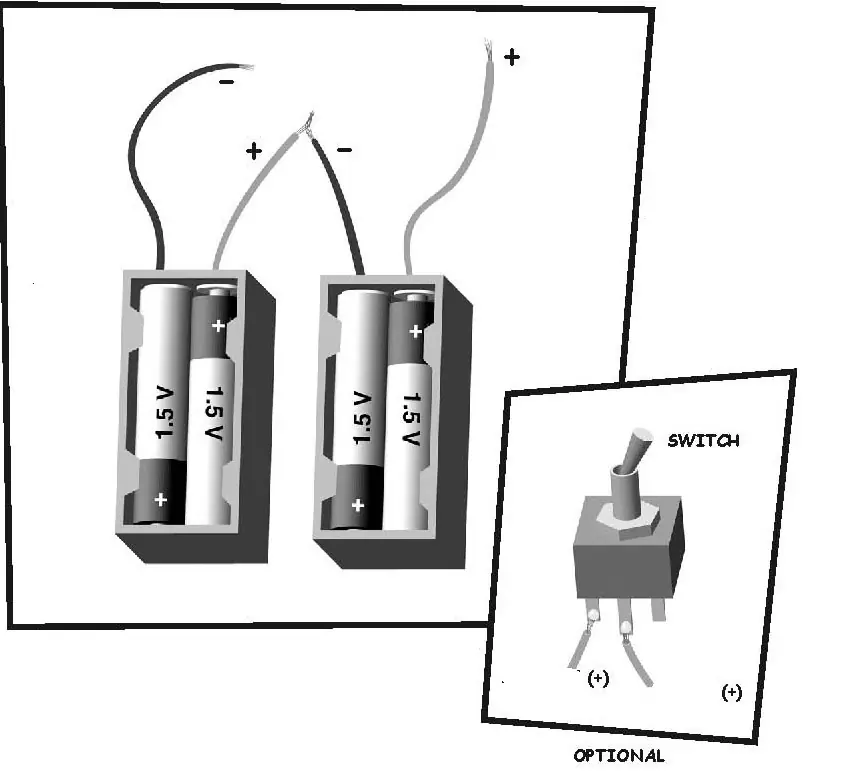
FIGURA 4: Como se conectan los portapilas para que el conjunto provea 6 voltios.
CONSTRUYENDO EL CUERPO DEL ROBOT
El cuerpo se hace a partir de un servo motor que tenga varios engranajes. Si es necesario se modifica este. Notemos que en el que usamos le colocamos un alambre de cobre grueso en la parte de abajo.

Se usa un engranaje grande cortado por la mitad una mitad se sujeta al eje del servo motor y el otro va en el alambre grueso.Ambas miatdes sujetan las patas de alambre.

Notemos abajo como se colocan los engranajes

Las patas de alambre de colgar ropa

Abajo se ve como se sujetan las patas al engranaje. El engranaje a su vez se sujeta a un disco de plástico u otro engranaje.

Como se deben colocar los portapilas a los lados del robot
En la parte de abajo se ve el circuito completo del robot walker
COMENTA Y DISFRUTA LA VIDA!