Este Beam es extramadamente sencillo y se puede crear unidireccional o bidireccional, el bidireccional usa dos circuitos iguales y el unidireccional solo uno.


MATERIALES:
DARLINGTON TIP 120
Resistencia 1k
Diodo 1N4007
LDR
NECESITAN:
- 2 DARLINGTON TIP 120.
- 2 Resistencias de 1k.
- 2 Diodos 1N4007.
- 2 LDR's pequeños.
- 2 Motores DC pequeños.
- 1 Portapilas para 2 pilas AA.
- 2 Pilas AA de 1,5V. (Alcalinas no recargables.)
el circuito quedaría mas o menos así:
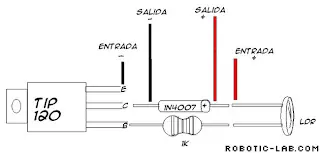
*La fuente de poder son dos pilas AA de 1.5 volts.
** Usa dos motores DC
*En las salidas + y - se conecta el motor o motores Para el bidireccionas se deve Conectar el motor izquierdo en las salidas del circuito derecho y viceversa.
Solo "tiene" 2 ruedas por que es para ver su funcionamiento, luego ya pueden ponerle imaginación y agregarle lo que quieran, pero siempre usando 2 motores.
Una idea sería poner un motor delante a la izquierda y otro detrás a la derecha, cada uno con una rueda, y luego en el lado delantero/derecho una rueda que gire por el movimiento, y en el lado trasero/izquierdo otra. (O poner los 2 motores delante, o atrás, pero poniendo uno delante y otro atrás consigues más precisión en los movimientos, y es más estable)
Y luego incluso pueden unirlas (la izquierda/delantera con la izquierda/trasera y así las derechas también) con una goma dentada para hacerlo tipo tanque, etc..
Espero que les sea de utilidad para iniciarse en la rama de la robotica BEAM.
MATERIALES:
DARLINGTON TIP 120
Resistencia 1k
Diodo 1N4007
LDR
NECESITAN:
- 2 DARLINGTON TIP 120.
- 2 Resistencias de 1k.
- 2 Diodos 1N4007.
- 2 LDR's pequeños.
- 2 Motores DC pequeños.
- 1 Portapilas para 2 pilas AA.
- 2 Pilas AA de 1,5V. (Alcalinas no recargables.)
el circuito quedaría mas o menos así:
*La fuente de poder son dos pilas AA de 1.5 volts.
** Usa dos motores DC
*En las salidas + y - se conecta el motor o motores Para el bidireccionas se deve Conectar el motor izquierdo en las salidas del circuito derecho y viceversa.
Solo "tiene" 2 ruedas por que es para ver su funcionamiento, luego ya pueden ponerle imaginación y agregarle lo que quieran, pero siempre usando 2 motores.
Una idea sería poner un motor delante a la izquierda y otro detrás a la derecha, cada uno con una rueda, y luego en el lado delantero/derecho una rueda que gire por el movimiento, y en el lado trasero/izquierdo otra. (O poner los 2 motores delante, o atrás, pero poniendo uno delante y otro atrás consigues más precisión en los movimientos, y es más estable)
Y luego incluso pueden unirlas (la izquierda/delantera con la izquierda/trasera y así las derechas también) con una goma dentada para hacerlo tipo tanque, etc..
Espero que les sea de utilidad para iniciarse en la rama de la robotica BEAM.