Motor de Inducción
Se puede ilustrar el principio del motor de inducción se realiza de la siguiente forma:
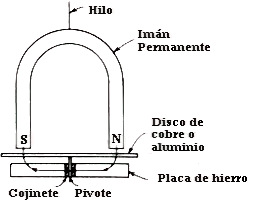
Se suspende un imán permanente de un hilo sobre una tornamesa de cobre o aluminio que gira en un cojinete colocado en una placa fija de hierro. El campo del imán permanente se completa así a través de la placa de hierro. El pivote debería estar relativamente sin fricción y el imán permanente debe tener la suficiente densidad de flujo. Cuando gira el imán en el hilo, se observará que el disco que está debajo gira con él, independientemente de la dirección de giro del imán.
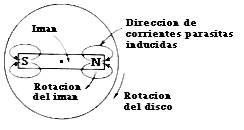
El disco sigue el movimiento del imán, como se muestra en la figura debido a las corrientes parásitas inducidas que se producen por el movimiento relativo de un conductor (el disco) y el campo magnético. Por la ley de Lenz, la dirección del voltaje inducido y de las corrientes parásitas consecuentes produce un campo magnético que tiende a oponerse a la fuerza o movimiento que produjo el voltaje inducido.
Las corrientes parásitas que se producen tienden a producir a su vez un polo S unitario en el disco en un punto bajo el polo N giratorio del imán y un polo N unitario en el disco bajo el polo S giratorio del imán. Por lo tanto, siempre que el imán continúe moviéndose, continuará produciendo corrientes parásitas y polos de signo contrario en el disco que está abajo. El disco, por lo tanto, gira en la misma dirección que el imán. pero debe girar a velocidad menor que la del imán. Si el disco girara a la misma velocidad que la del imán, no habría movimiento relativo entre el conductor y el campo magnético y no se producirían corrientes parásitas en el disco.
Característica de Funcionamiento del Motor de Inducción
El funcionamiento de un motor, en general, se basa en las propiedades electromagnéticas de la corriente eléctrica y la posibilidad de crear ,a partir de ellas, unas determinadas fuerzas de atracción y repulsión encargadas de actuar sobre un eje y generar un movimiento de rotación.
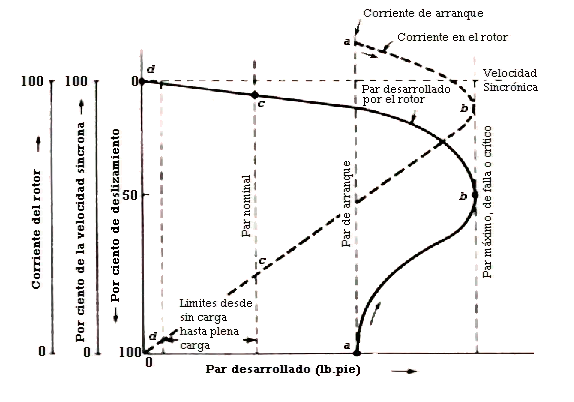
Suponiendo que un motor de inducción comercial de jaula de ardilla se haga arrancar con el voltaje nominal en las terminales de línea de su estator (arranque a través de la línea) desarrollará un par de arranque de acuerdo que hará que aumente su velocidad. Al aumentar su velocidad a partir del reposo (100 por ciento de deslizamiento), disminuye su deslizamiento y su par disminuye hasta el valor en el que se desarrolle el par máximo . Esto hace que la velocidad aumente todavía más, reduciéndose en forma simultánea el deslizamiento y el par que desarrolla el motor de inducción.
Los pares desarrollados al arranque y al valor del deslizamiento que produce el par máximo ambos exceden (en el caso normal) al par aplicado a la carga. Por lo tanto la velocidad del motor aumentará, hasta que el valor del deslizamiento sea tan pequeño que el par que se desarrolla se reduzca a un valor igual al par aplicado por la carga. El motor continuará trabajando a esta velocidad y valor de equilibrio del desliza-miento hasta que aumente o disminuya el par aplicado.
Se muestra la relación entre los pares de arranque, máximo y nominal a plena carga que desarrolla un motor de inducción, como función de la velocidad de éste y del deslizamiento. Esta figura es presentación gráfica de la corriente y el par desarrollados en el rotor del motor como funciones del deslizamiento desde el instante del arranque (punto a) hasta la condición de funcionamiento en estado estable (en general entre marcha en vacío y marcha a plena carga - puntos c y d) cuando los pares desarrollado y aplicado son iguales.
Clasificación de los Motores Asincrónicos
Según el diseño de la jaula,( Nema)
Motor de diseño NEMA A
Torque alto, deslizamiento nominal bajo y corriente de arranque alta.
Es un motor de inducción con rotor tipo jaula de ardilla, diseñado con características de torque y corriente de arranque que exceden los valores correspondientes al diseño NEMA B, son usados para aplicaciones especiales donde se requiere un torque máximo mayor que el normal, para satisfacer los requerimientos de sobrecargas de corta duración.
Estos motores también son aplicados a cargas que requieren deslizamientos nominales muy bajos y del orden del 1% o menos (velocidades casi constantes).
Motor de diseño NEMA B
Torque normal, corriente de arranque normal y deslizamiento nominal normal.
Son motores con rotor tipo jaula de ardilla diseñados con características de torque y corriente de arranque normales, así como un bajo deslizamiento de carga de aproximadamente 4% como máximo. En general es el motor típico dentro del rango de 1 a 125 HP. El deslizamiento a plena carga es de aproximadamente 3%.
Este tipo de motor proporcionará un arranque y una aceleración suave para la mayoría de las cargas y también puede resistir temporalmente picos elevados de carga sin detenerse.
Motor de diseño NEMA C
Torque alto, deslizamiento nominal normal, corriente de arranque normal. Son motores de inducción con rotor de doble jaula de ardilla, que desarrollan un alto torque de arranque y por ello son utilizados para cargas de arranque pesado. Estos motores tienen un deslizamiento nominal menor que el 5%.
Motor de diseño NEMA D
Torque alto, alto deslizamiento nominal, baja corriente de arranque.
Este motor combina un alto torque de arranque con un alto deslizamiento nominal. Generalmente se presentan dos tipos de diseño, uno con deslizamiento nominal de 5 a 8% y otro con deslizamiento nominal de 8 a 13%. Cuando el deslizamiento nominal puede ser mayor del 13%, se les denomina motores de alto deslizamiento o muy alto deslizamiento (ULTRA HIGH SLIP). El torque de arranque es generalmente de 2 a 3 veces el par nominal aunque para aplicaciones especiales puede ser más alto. Estos motores son recomendados para cargas cíclicas y para cargas de corta duración con frecuentes arranques y paradas.
Motores de diseño NEMA F
Torque de arranque bajo, corriente de arranque baja, bajo deslizamiento nominal.
Son motores poco usados, destinándose a cargas con frecuentes arranques. Pueden ser de altos torques y se utiliza en casos en los que es importante limitar la corriente de arranque.
Dibujo de un motor de Inducción
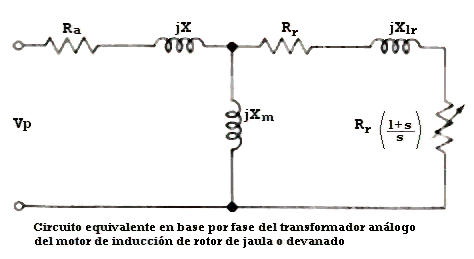
Un motor de inducción se comporta como un transformador
Devanado primario = estator
Devanado secundario = rotor
La corriente del devanado primario(estator) crea un campo magnético giratorio, el cual induce una corriente en el devanado secundario(rotor). La corriente del rotor junto con el campo magnético inducido provocan una fuerza, que es la causa de la rotación del motor.
Debido a que la transformación de potencia entre rotor y estator depende de la variación del flujo, si la velocidad del rotor aumenta, menos cantidad de potencia se puede convertir y además se van solapando la velocidad del rotor con la del campo magnético giratorio, 50 o 60 Hz .Esto significa que a la velocidad de sincronismo no existe conversión de potencia y el motor se para. La diferencia entre la velocidad de sincronismo y la velocidad real se la denomina deslizamiento. La velocidad del motor viene determinada por la frecuencia y el deslizamiento.
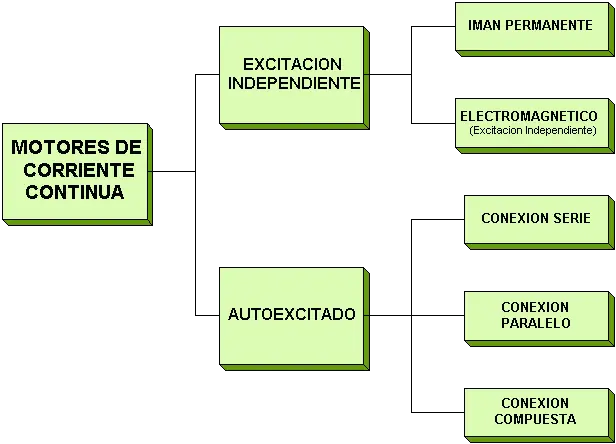
Motor de corriente Continua
Todos los motores eléctricos tienen básicamente los mismos componentes. Todos tienen un magneto estacionario denominado el estator y un electroimán denominado la armadura. El estator genera el campo magnético. Cuando una corriente eléctrica se hace pasa por el embobinado de la armadura que se ha colocado en el campo magnético generado por el estator, esta comienza a rotar debido al torque magnético. De esta manera al energía eléctrica se convierte en energía mecánica . Si el eje del motor se conecta mediante una correa a una polea esta se pone en movimiento.
Un motor de CC esta compuesto por un imán fijo que constituye el inductor y un bobinado denominado inducido que es capaz de girar en el interior del primero, cuando recibe una CC.
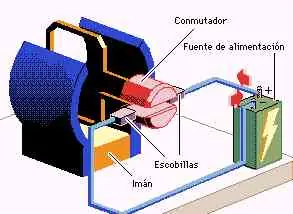
Suponiendo un motor elemental según se representa, si sobre la bobina se hace pasar una corriente se creara en la misma en un campo magnético que la hará girar al crearse una fuerza de atracción y repulsión con respecto al imán del estator. Durante este giro se produce una serie de efectos que condicionan la construcción del motor, el primero de ellos se produce cuando se enfrentan dos polos de distinto signo, momento en que la atracción será máxima y la bobina tiende a detenerse, sin embargo, por inercia pasará de largo pero el sentido de giro se invertirá y se volverá hacia atrás deteniéndose al cabo de unas cuantas oscilaciones. Ahora bien, si en el momento en que los polos opuestos se enfrentan, se invierte el sentido de la circulación de la corriente de la bobina, automáticamente se producirá un cambio de signo en los polos magnéticos creados por la misma, dando origen a que aparezcan unas fuerzas de repulsión entre ellos que obligará a aquella a seguir girando otra media vuelta, debiéndose invertir la corriente nuevamente y así sucesivamente.
El método empleado para producir estos cambios es el de dividir el anillo colector por el que recibe la bobina la corriente de alimentación, en dos mitades iguales separadas por un material aislante, que giran deslizándose sobre dos contactos eléctricos fijos o escobillas uno conectado al polo positivo y el otro al negativo.
De esta forma dichos contactos cruzaran dos veces por cada rotación la división entre los semianillos, inviertendose así el sentido de circulación de la corriente de la bobina.
En los motores de CC es necesario aplicar al inducido una CC para obtener movimiento, así como al inductor en el caso de que éste sea del tipo de electroimán, conociéndose a esta última con la denominación de corriente de excitación. Su construcción suele estar realizada mediante un inductor cilíndrico hueco (imán o electroimán) que contiene un cierto número de pares de polos magnéticos (Norte-Sur), que se conoce con el nombre de Estator. En su interior se encuentra el inducido o rotor también cilíndrico sobre el cual se encuentra el arrollamiento. El eje está acoplado mediante rodamiento o cojinetes para permitir el giro y dispone de una superficie de contacto montada sobre un dispositivo llamado colector sobre el que se deslizan los contactos externos o escobillas.
INVERSIÓN DEL SENTIDO DE GIRO EN MOTORES DE CC.
Para invertir el sentido de giro de un motor de cc., basta con invertir la polaridad de la tensión aplicada en sus Bornes VB (con lo cual varía el sentido de la corriente que circula por su bobinado), y hacer así que el par de fuerzas que originan el giro del motor sea de sentido contrario.
Otro método de invertir el sentido de giro es el de invertir la polaridad del campo magnético producido por las bobinas excitadoras, esto solo puede hacerse en máquinas que las tengan accesibles desde el exterior.
Los motores de corriente continua están fabricados para las tensiones normales de línea de 6, 9, 12, 24, 32, 110, 220 y 550.
Las velocidades normales a plena carga son:850, 1140, 1725 y 3500 r.p.m.
Componentes
Imanes, escobillas que van encima del conmutador, hilo de cobre, láminas superpuestas donde va enrollado el hilo, conmutador, eje de metal donde se coloca la bobina de hilo de cobre, carcasa donde se introducen todos los componentes.
Descripción
El imán del motor tiene forma de media luna, hay dos imanes uno en cada lado.
Las escobillas están colocadas en la base del motor y son de una mezcla de grafito y cobre, hay dos una de cada polo. Allí es donde hay que conectar la pila.
El hilo de cobre va enrollado sobre unas laminas superpuestas en forma de circulo dividido en tres partes. Todo ello forma el rotor.
Eje de metal de diferentes medidas dependiendo del motor.
La carcasa tiene forma de cilindro.

En este caso estaremos tratando sobre los motores de jaula de ardilla.
Estos motores provienen de los motores polifásicos de inducción. Suponiendo que un motor de inducción comercial de jaula de ardilla se haga arrancar con el voltaje nominal de las terminales de línea de su estator desarrollará un par de arranque que hará que aumente la velocidad. Al aumentar la velocidad a partir del reposo (100% de deslizamiento) disminuye su deslizamiento y su par disminuye hasta que se desarrolla un par máximo. Esto hace que la velocidad aumente todavía más, reduciéndose en forma simultánea el deslizamiento y el par que desarrolla el motor de inducción.
Los pares desarrollados al arranque y al valor de desplazamiento que produce el par máximo, en ambos exceden el par de la carga, por lo tanto la velocidad del motor aumentará hasta que el valor de desplazamiento sea tan pequeño que el par que se desarrolla se reduzca a un valor igual al aplicado por la carga. El motor continuará trabajando a esa velocidad y el valor de equilibrio del desplazamiento, hasta que aumente o disminuya el par aplicado.
La característica esencial que distingue a una máquina de inducción de los demás motores eléctricos es que las corrientes secundarias son creadas únicamente por inducción.
Cuando se desarrolló por primera vez el rotor de doble jaula de ardilla se creo tal variedad y adaptabilidad en el diseño de rotores para motores de inducción que ha llevado a diversas características de curva deslizamiento - par. Al dar la proporción correcta al devanado de doble jaula de ardilla, los fabricantes han desarrollado numerosas variaciones del diseño del rotor de vaciado o normal único. Estas variaciones tienen por consecuencia pares de arranque mayores o menores que el diseño normal y también menores corrientes de arranque.
Para distinguir entre diversos tipos disponibles, la National Eléctrical Manufacturers Association (NEMA) ha desarrollado un sistema de identificación con letras en la cual cada tipo de motor comercial de inducción de jaula de ardilla se fabrica de acuerdo con determinada norma de diseño y se coloca en determinada clase, identificada con una letra. Las propiedades de la construcción eléctrica y mecánica el rotor, en las cinco clases NEMA de motores de inducción de jaula de ardilla, se resume en la siguiente tabla:
MOTORES DE INDUCCION DE JAULA DE ARDILLA CLASE A
El motor clase A es un motor de jaula de ardilla normal o estándar fabricado para uso a velocidad constante. Tiene grandes áreas de ranuras para una muy buena disipación de calor, y barras con ranuras ondas en el motor. Durante el periodo de arranque, la densidad de corriente es alta cerca de la superficie del rotor; durante el periodo de la marcha, la densidad se distribuye con uniformidad. Esta diferencia origina algo de alta resistencia y baja reactancia de arranque, con lo cuál se tiene un par de arranque entre 1.5 y 1.75 veces el nominal ( a plena carga). El par de arranque es relativamente alto y la baja resistencia del rotor producen una aceleración bastante rápida hacia la velocidad nominal. Tiene la mejor regulación de velocidad pero su corriente de arranque varía entre 5 y 7 veces la corriente nominal normal, haciéndolo menos deseable para arranque con línea, en especial en los tamaños grandes de corriente que sean indeseables.
Motores de inducción de jaula de ardilla clase B
A los motores de clase B a veces se les llama motores de propósito general; es muy parecido al de la clase A debido al comportamiento de su deslizamiento-par. Las ranuras de su motor están embebidas algo más profundamente que el los motores de clase A y esta mayor profundidad tiende a aumentar la reactancia de arranque y la marcha del rotor. Este aumento reduce un poco el par y la corriente de arranque.
Las corrientes de arranque varían entre 4 y 5 veces la corriente nominal en los tamaños mayores de 5 HP se sigue usando arranque a voltaje reducido. los motores de clase B se prefieren sobre los de la clase A para tamaños mayores.
Las aplicaciones típicas comprenden las bombas centrífugas de impulsión, las máquinas herramientas y los sopladores.
MOTORES DE INDUCCION DE JAULA DE ARDILLA CLASE C
Estos motores tienen un rotor de doble jaula de ardilla, el cual desarrolla un alto par de arranque y una menor corriente de arranque.
Debido a su alto par de arranque, acelera rápidamente, sin embargo cuando se emplea en grandes cargas, se limita la disipación térmica del motor por que la mayor parte de la corriente se concentra en el devanado superior.
En condiciones de arranque frecuente, el rotor tiene tendencia a sobre calentarse se adecua mejor a grandes cargas repentinas pero de tipo de baja inercia.
MOTORES DEINDUCCION DE JAULA DE ARDILLA CLASE D
Los motores comerciales de inducción de jaula de ardilla clase D se conocen también como de alto par y alta resistencia.
Las barras del rotor se fabrican en aleación de alta resistencia y se colocan en ranuras cercanas a la superficie o están embebidas en ranuras de pequeño diámetro. La relación de resistencia a reactancia del rotor de arranque es mayor que en lo motores de las clases anteriores.
El motor está diseñado para servicio pesado de arranque, encuentra su mayor aplicación con cargas como cizallas o troqueles, que necesitan el alto par con aplicación a carga repentina la regulación de velocidad en esta clase de motores es la peor.
MOTORES DE INDUCCIÓN DE JAULA DE ARDILLA DE CLASE F
También conocidos como motores de doble jaula y bajo par. Están diseñados principalmente como motores de baja corriente, porque necesita la menor corriente de arranque de todas las clases. Tiene una alta resistencia del rotor tanto en su devanado de arranque como en el de marcha y tiende a aumentar la impedancia de arranque y de marcha, y a reducir la corriente de marcha y de arranque.
El rotor de clase F se diseño para remplazar al motor de clase B. El motor de clase F produce pares de arranque aproximadamente 1.25 veces el par nominal y bajas corrientes de arranque de 2 a 4 veces la nominal. Los motores de esta clase se fabrican de la capacidad de 25 hp para servicio directo de la línea. Debido a la resistencia del rotor relativamente alta de arranque y de marcha, estos motores tienen menos regulación de voltaje de los de clase B, bajan capacidad de sobrecarga y en general de baja eficiencia de funcionamiento. Sin embargo , cuando se arrancan con grandes cargas, las bajas de corrientes de arranque eliminan la necesidad de equipo para voltaje reducido, aún en los tamaños grandes.
CLASIFICACIÓN DE LOS MOTORES DE INDUCCIÓN DE JAULA DE ARDILLA DE ACUERDO CON EL ENFRIAMIENTO Y EL AMBIENTE DE TRABAJO.
Los motores comerciales de inducción de jaula de ardilla, y en general todos lo motores eléctricos , se pueden clasificar también de acuerdo con el ambiente en que funcionan, sí también como en los métodos de enfriamiento.
La temperatura ambiente juega un papel importante en la capacidad y selección del tamaño de armazón para una dínamo, parte importante del motivo es que la temperatura ambiente influye en la elevación permisible de temperatura por sobre los 40º C normales. Por ejemplo una dínamo que trabaje a una temperatura ambiente de 75º C empleando aislamiento clase B tiene un aumento permisible de temperatura de tan solo 55º C. Si trabajara a su temperatura ambiente normal de 40 º C se podría permitir un aumento de temperatura de 90º C, sin dañar su aislamiento.
También se hizo notar que la hermeticidad de la máquina afecta a su capacidad. Una máquina con una armazón totalmente abierta con un ventilador interno en su eje, permite un fácil paso de aire succionado y arrojado. Esta caja origina una temperatura final de trabajo en los devanados, menor en comparación que la de una máquina totalmente cerrada que evita el intercambio de aire con el exterior.
Esto da como resultado que existe una clasificación de los motores por el tipo de carcaza.
TIPOS DE ENVOLVENTES O CARCAZAS.
La NEMA reconoce los siguientes:
1.carcaza a prueba de agua. Envolvente totalmente cerrada para impedir que entre agua aplicada en forma de un chorro o manguera, al recipiente de aceite y con medios de drenar agua al interior. El medio para esto último puede ser una válvula de retención o un agujero machuelado en la parte más inferior del armazón, para conectar un tipo de drenado.
2.carcaza a prueba de ignición de polvos. Envolvente totalmente cerrada diseñada y fabricada para evitar que entren cantidades de polvo que puedan encender o afectar desempeño o capacidad.
3.carcaza a prueba de explosión. Envolvente totalmente cerrada diseñada y construida para resistir una explosión de un determinado gas o vapor que pueda estar dentro de un motor, y también para evitar la ignición de determinado gas o vapor que lo rodee, debido a chispas o llamaradas en su interior.
4.carcaza totalmente cerrada envolvente que evita el intercambio de aire entre el interior y el exterior de ella pero que no es lo suficiente mente cerrada para poderla considerar hermética al aire.
5.carcaza protegida al temporal. Envolvente abierta cuyos conductos de ventilación están diseñados para reducir al mínimo la entrada de lluvia o nieve y partículas suspendidas en el aire, y el acceso de estas en las partes eléctricas.
6.carcaza protegida. Envolvente abierta en la cual todas las aberturas conducen directamente a partes vivas o giratorias, exceptuando los ejes lisos del motor, tienen tamaño limitado mediante el diseño de partes estructurales o parrillas coladeras o metal desplegado etc. Par< evitar el contacto accidental con las parte vivas
7.Carcaza a prueba de salpicaduras. Envolvente abierta en la que las aberturas de ventilación están fabricadas de tal modo que si caen partículas de sólidos o gotas de líquidos a cualquier ángulo no mayor de 100º con la vertical no puedan entrar en forma directa o por choque de flujo por una superficie horizontal o inclinada hacia adentro.
8.Carcaza a prueba de goteo envolvente abierta en que las aberturas de ventilación se construye de tal modo que si caen partículas sólidas o gotas de líquido a cualquier ángulo no mayor de 15º con la vertical no pueda entrar ya sea en forma directa o por choque y flujo por una superficie horizontal o inclinada hacia adentro.
9.Carcaza abierta envolvente que tiene agujeros de ventilación que permiten el flujo de aire externo de enfriamiento sobre y alrededor de los devanados de la máquina.
El costo y el tamaño de los motores totalmente cerrados es mayor que el de los motores abiertos, de la misma potencia y ciclo de trabajo y elevación sobre la temperatura ambiente.
SELECCIÓN DE VELOCIDADES NOMINALES DEMOTORES DE INDUCCION DE JAULA DE ARDILLA O DE ROTOR DEVANADO.
Dado que el deslizamiento de la mayor parte de los motores comerciales de inducción de jaula de ardilla, a la velocidad nominal en general de alrededor de un 5% , no se pueden alcanzar velocidades mayores a 3600 r.p.m. A 60 Hz, las velocidades son muy múltiplos de los inversos del números de polos en el estator: 1800, 1200, 900, 720 r.p.m. Etc. En general, se prefieren los motores de alta velocidad a los de baja velocidad, de la misma potencia y voltaje, debido a que:
•Son de tamaño menor y en consecuencia de menor peso
•Tienen mayor par de arranque
•Tienen mayores eficiencias
•A la carga nominal, tienen mayores factores de potencia
•Son menos costosos.
Por estas razones se suele dotar de cajas de engranes o embrague a los motores de inducción de jaula de ardilla para permitir velocidades de eje de cerca sobre 3600 r.p.m. y por debajo de 200 r.p.m. En muchos usos o aplicaciones comerciales particularmente en capacidades de menor potencia, la caja de engranes o de embrague va incorporada en la caja del motor, formando unidad integral con este.
EFECTO DE LA VARIACIÓN DE VOLTAJE SOBRE LA VELOCIDAD DE UN MOTOR DE INDUCIDO DE JAULA DE ARDILLA O DE ROTOR DEVANADO.
Si solo hacemos variar el voltaje del estator no se produce una variación correspondiente en el deslizamiento y la velocidad. Entonces si los demás factores permanecen constantes, el par del motor es directamente proporcional al cuadrado del voltaje. Esto significa que si se aumenta el voltaje en el estator , se produce un aumento mucho mayor en el par y, correspondientemente, una reducción en el desplazamiento, es decir el deslizamiento varía inversamente con el cuadrado del voltaje o en proporción al inverso del par.
Para fines de cálculo, podemos resumir la relación entre par y voltaje de estator como sigue:
En el cual el subíndice "n" representa el nuevo valor
El subíndice "o" representa el valor original.
El cálculo del deslizamiento con un cambio en el voltaje del estator (y del rotor) es un tanto más complejo, porque el deslizamiento varía también con la resistencia del rotor, el voltaje del estator y/o el par. La relación se puede resumir de la siguiente forma: para la cual se ha definido previamente los símbolos y subíndices.
A la siguiente figura se muestra el efecto de una reducción en el voltaje del estator sobre la curva característica par- deslizante
De un motor de inducción de jaula de ardilla de propósito general. Al voltaje nominal del estator Vs, el motor entrega el par niminal a un desplazamiento aproximado de 5 %, lo cual se ve en el punto a de la figura a una reducción del 80 % del voltaje del estator, suponiendo una carga convencional cuyo par varíe con la velocidad, disminuyen tanto el par como la velocidad,, con lo cual se tiene un aumento en el deslizamiento , como se muestra en el punto b. Una reducción semejante de voltaje produce tanto la reducción en el par como aumento en el desplazameinmto en el punto c. La extrapolación de los puntos a, b, y c produce la línea de carga que aparece punteada para mayores reducciones en el voltaje del estator.
Por tanto si se tiene mayor calentamiento a la menor velocidad, así como una eficiencia reducida, lo cuál causa un rápido deterioro en el aislamiento del motor. Por tanto se acostumbra limitar la variación de voltaje sobre el par, el deslizamiento y la velocidad, empleando las ecuaciones 1 y 2
El siguiente ejemplo muestra que tanto resiste la velocidad de un motor comercial de inducción de jaula de ardilla a un cambio de voltaje en el estator. Como se muestra en la parte (d) de ese ejemplo, cuando se reduce 10 % el voltaje del estator, tan solo produce ¡una disminución de 1.23% en la velocidad!
Ejemplo 1
Un motor de jaula de ardilla trifásico , 10hp, cuatro polos, 220 V, produce un par de 30 lb pie a la velocidad nominal de 1710 r.p.m. calcular.
a.el desplazamiento y velocidad nuevos a un voltaje impreso en el estator igual a 242 V
b.repetir parte (a) a 198 V
c.el cambio porcentual en el deslizamiento y velocidad debido a un cambio de voltaje en la parte (a)
d.el cambio porcentual en el deslizamiento y velocidad debido a un cambio de voltaje en la parte (b)
solución
Se puede ilustrar el principio del motor de inducción se realiza de la siguiente forma:
Se suspende un imán permanente de un hilo sobre una tornamesa de cobre o aluminio que gira en un cojinete colocado en una placa fija de hierro. El campo del imán permanente se completa así a través de la placa de hierro. El pivote debería estar relativamente sin fricción y el imán permanente debe tener la suficiente densidad de flujo. Cuando gira el imán en el hilo, se observará que el disco que está debajo gira con él, independientemente de la dirección de giro del imán.
El disco sigue el movimiento del imán, como se muestra en la figura debido a las corrientes parásitas inducidas que se producen por el movimiento relativo de un conductor (el disco) y el campo magnético. Por la ley de Lenz, la dirección del voltaje inducido y de las corrientes parásitas consecuentes produce un campo magnético que tiende a oponerse a la fuerza o movimiento que produjo el voltaje inducido.
Las corrientes parásitas que se producen tienden a producir a su vez un polo S unitario en el disco en un punto bajo el polo N giratorio del imán y un polo N unitario en el disco bajo el polo S giratorio del imán. Por lo tanto, siempre que el imán continúe moviéndose, continuará produciendo corrientes parásitas y polos de signo contrario en el disco que está abajo. El disco, por lo tanto, gira en la misma dirección que el imán. pero debe girar a velocidad menor que la del imán. Si el disco girara a la misma velocidad que la del imán, no habría movimiento relativo entre el conductor y el campo magnético y no se producirían corrientes parásitas en el disco.
Característica de Funcionamiento del Motor de Inducción
El funcionamiento de un motor, en general, se basa en las propiedades electromagnéticas de la corriente eléctrica y la posibilidad de crear ,a partir de ellas, unas determinadas fuerzas de atracción y repulsión encargadas de actuar sobre un eje y generar un movimiento de rotación.
Suponiendo que un motor de inducción comercial de jaula de ardilla se haga arrancar con el voltaje nominal en las terminales de línea de su estator (arranque a través de la línea) desarrollará un par de arranque de acuerdo que hará que aumente su velocidad. Al aumentar su velocidad a partir del reposo (100 por ciento de deslizamiento), disminuye su deslizamiento y su par disminuye hasta el valor en el que se desarrolle el par máximo . Esto hace que la velocidad aumente todavía más, reduciéndose en forma simultánea el deslizamiento y el par que desarrolla el motor de inducción.
Los pares desarrollados al arranque y al valor del deslizamiento que produce el par máximo ambos exceden (en el caso normal) al par aplicado a la carga. Por lo tanto la velocidad del motor aumentará, hasta que el valor del deslizamiento sea tan pequeño que el par que se desarrolla se reduzca a un valor igual al par aplicado por la carga. El motor continuará trabajando a esta velocidad y valor de equilibrio del desliza-miento hasta que aumente o disminuya el par aplicado.
Se muestra la relación entre los pares de arranque, máximo y nominal a plena carga que desarrolla un motor de inducción, como función de la velocidad de éste y del deslizamiento. Esta figura es presentación gráfica de la corriente y el par desarrollados en el rotor del motor como funciones del deslizamiento desde el instante del arranque (punto a) hasta la condición de funcionamiento en estado estable (en general entre marcha en vacío y marcha a plena carga - puntos c y d) cuando los pares desarrollado y aplicado son iguales.
Clasificación de los Motores Asincrónicos
Según el diseño de la jaula,( Nema)
Motor de diseño NEMA A
Torque alto, deslizamiento nominal bajo y corriente de arranque alta.
Es un motor de inducción con rotor tipo jaula de ardilla, diseñado con características de torque y corriente de arranque que exceden los valores correspondientes al diseño NEMA B, son usados para aplicaciones especiales donde se requiere un torque máximo mayor que el normal, para satisfacer los requerimientos de sobrecargas de corta duración.
Estos motores también son aplicados a cargas que requieren deslizamientos nominales muy bajos y del orden del 1% o menos (velocidades casi constantes).
Motor de diseño NEMA B
Torque normal, corriente de arranque normal y deslizamiento nominal normal.
Son motores con rotor tipo jaula de ardilla diseñados con características de torque y corriente de arranque normales, así como un bajo deslizamiento de carga de aproximadamente 4% como máximo. En general es el motor típico dentro del rango de 1 a 125 HP. El deslizamiento a plena carga es de aproximadamente 3%.
Este tipo de motor proporcionará un arranque y una aceleración suave para la mayoría de las cargas y también puede resistir temporalmente picos elevados de carga sin detenerse.
Motor de diseño NEMA C
Torque alto, deslizamiento nominal normal, corriente de arranque normal. Son motores de inducción con rotor de doble jaula de ardilla, que desarrollan un alto torque de arranque y por ello son utilizados para cargas de arranque pesado. Estos motores tienen un deslizamiento nominal menor que el 5%.
Motor de diseño NEMA D
Torque alto, alto deslizamiento nominal, baja corriente de arranque.
Este motor combina un alto torque de arranque con un alto deslizamiento nominal. Generalmente se presentan dos tipos de diseño, uno con deslizamiento nominal de 5 a 8% y otro con deslizamiento nominal de 8 a 13%. Cuando el deslizamiento nominal puede ser mayor del 13%, se les denomina motores de alto deslizamiento o muy alto deslizamiento (ULTRA HIGH SLIP). El torque de arranque es generalmente de 2 a 3 veces el par nominal aunque para aplicaciones especiales puede ser más alto. Estos motores son recomendados para cargas cíclicas y para cargas de corta duración con frecuentes arranques y paradas.
Motores de diseño NEMA F
Torque de arranque bajo, corriente de arranque baja, bajo deslizamiento nominal.
Son motores poco usados, destinándose a cargas con frecuentes arranques. Pueden ser de altos torques y se utiliza en casos en los que es importante limitar la corriente de arranque.
Dibujo de un motor de Inducción
Un motor de inducción se comporta como un transformador
Devanado primario = estator
Devanado secundario = rotor
La corriente del devanado primario(estator) crea un campo magnético giratorio, el cual induce una corriente en el devanado secundario(rotor). La corriente del rotor junto con el campo magnético inducido provocan una fuerza, que es la causa de la rotación del motor.
Debido a que la transformación de potencia entre rotor y estator depende de la variación del flujo, si la velocidad del rotor aumenta, menos cantidad de potencia se puede convertir y además se van solapando la velocidad del rotor con la del campo magnético giratorio, 50 o 60 Hz .Esto significa que a la velocidad de sincronismo no existe conversión de potencia y el motor se para. La diferencia entre la velocidad de sincronismo y la velocidad real se la denomina deslizamiento. La velocidad del motor viene determinada por la frecuencia y el deslizamiento.
Motor de corriente Continua
Todos los motores eléctricos tienen básicamente los mismos componentes. Todos tienen un magneto estacionario denominado el estator y un electroimán denominado la armadura. El estator genera el campo magnético. Cuando una corriente eléctrica se hace pasa por el embobinado de la armadura que se ha colocado en el campo magnético generado por el estator, esta comienza a rotar debido al torque magnético. De esta manera al energía eléctrica se convierte en energía mecánica . Si el eje del motor se conecta mediante una correa a una polea esta se pone en movimiento.
Un motor de CC esta compuesto por un imán fijo que constituye el inductor y un bobinado denominado inducido que es capaz de girar en el interior del primero, cuando recibe una CC.
Suponiendo un motor elemental según se representa, si sobre la bobina se hace pasar una corriente se creara en la misma en un campo magnético que la hará girar al crearse una fuerza de atracción y repulsión con respecto al imán del estator. Durante este giro se produce una serie de efectos que condicionan la construcción del motor, el primero de ellos se produce cuando se enfrentan dos polos de distinto signo, momento en que la atracción será máxima y la bobina tiende a detenerse, sin embargo, por inercia pasará de largo pero el sentido de giro se invertirá y se volverá hacia atrás deteniéndose al cabo de unas cuantas oscilaciones. Ahora bien, si en el momento en que los polos opuestos se enfrentan, se invierte el sentido de la circulación de la corriente de la bobina, automáticamente se producirá un cambio de signo en los polos magnéticos creados por la misma, dando origen a que aparezcan unas fuerzas de repulsión entre ellos que obligará a aquella a seguir girando otra media vuelta, debiéndose invertir la corriente nuevamente y así sucesivamente.
El método empleado para producir estos cambios es el de dividir el anillo colector por el que recibe la bobina la corriente de alimentación, en dos mitades iguales separadas por un material aislante, que giran deslizándose sobre dos contactos eléctricos fijos o escobillas uno conectado al polo positivo y el otro al negativo.
De esta forma dichos contactos cruzaran dos veces por cada rotación la división entre los semianillos, inviertendose así el sentido de circulación de la corriente de la bobina.
En los motores de CC es necesario aplicar al inducido una CC para obtener movimiento, así como al inductor en el caso de que éste sea del tipo de electroimán, conociéndose a esta última con la denominación de corriente de excitación. Su construcción suele estar realizada mediante un inductor cilíndrico hueco (imán o electroimán) que contiene un cierto número de pares de polos magnéticos (Norte-Sur), que se conoce con el nombre de Estator. En su interior se encuentra el inducido o rotor también cilíndrico sobre el cual se encuentra el arrollamiento. El eje está acoplado mediante rodamiento o cojinetes para permitir el giro y dispone de una superficie de contacto montada sobre un dispositivo llamado colector sobre el que se deslizan los contactos externos o escobillas.
INVERSIÓN DEL SENTIDO DE GIRO EN MOTORES DE CC.
Para invertir el sentido de giro de un motor de cc., basta con invertir la polaridad de la tensión aplicada en sus Bornes VB (con lo cual varía el sentido de la corriente que circula por su bobinado), y hacer así que el par de fuerzas que originan el giro del motor sea de sentido contrario.
Otro método de invertir el sentido de giro es el de invertir la polaridad del campo magnético producido por las bobinas excitadoras, esto solo puede hacerse en máquinas que las tengan accesibles desde el exterior.
Los motores de corriente continua están fabricados para las tensiones normales de línea de 6, 9, 12, 24, 32, 110, 220 y 550.
Las velocidades normales a plena carga son:850, 1140, 1725 y 3500 r.p.m.
Componentes
Imanes, escobillas que van encima del conmutador, hilo de cobre, láminas superpuestas donde va enrollado el hilo, conmutador, eje de metal donde se coloca la bobina de hilo de cobre, carcasa donde se introducen todos los componentes.
Descripción
El imán del motor tiene forma de media luna, hay dos imanes uno en cada lado.
Las escobillas están colocadas en la base del motor y son de una mezcla de grafito y cobre, hay dos una de cada polo. Allí es donde hay que conectar la pila.
El hilo de cobre va enrollado sobre unas laminas superpuestas en forma de circulo dividido en tres partes. Todo ello forma el rotor.
Eje de metal de diferentes medidas dependiendo del motor.
La carcasa tiene forma de cilindro.
En este caso estaremos tratando sobre los motores de jaula de ardilla.
Estos motores provienen de los motores polifásicos de inducción. Suponiendo que un motor de inducción comercial de jaula de ardilla se haga arrancar con el voltaje nominal de las terminales de línea de su estator desarrollará un par de arranque que hará que aumente la velocidad. Al aumentar la velocidad a partir del reposo (100% de deslizamiento) disminuye su deslizamiento y su par disminuye hasta que se desarrolla un par máximo. Esto hace que la velocidad aumente todavía más, reduciéndose en forma simultánea el deslizamiento y el par que desarrolla el motor de inducción.
Los pares desarrollados al arranque y al valor de desplazamiento que produce el par máximo, en ambos exceden el par de la carga, por lo tanto la velocidad del motor aumentará hasta que el valor de desplazamiento sea tan pequeño que el par que se desarrolla se reduzca a un valor igual al aplicado por la carga. El motor continuará trabajando a esa velocidad y el valor de equilibrio del desplazamiento, hasta que aumente o disminuya el par aplicado.
La característica esencial que distingue a una máquina de inducción de los demás motores eléctricos es que las corrientes secundarias son creadas únicamente por inducción.
Cuando se desarrolló por primera vez el rotor de doble jaula de ardilla se creo tal variedad y adaptabilidad en el diseño de rotores para motores de inducción que ha llevado a diversas características de curva deslizamiento - par. Al dar la proporción correcta al devanado de doble jaula de ardilla, los fabricantes han desarrollado numerosas variaciones del diseño del rotor de vaciado o normal único. Estas variaciones tienen por consecuencia pares de arranque mayores o menores que el diseño normal y también menores corrientes de arranque.
Para distinguir entre diversos tipos disponibles, la National Eléctrical Manufacturers Association (NEMA) ha desarrollado un sistema de identificación con letras en la cual cada tipo de motor comercial de inducción de jaula de ardilla se fabrica de acuerdo con determinada norma de diseño y se coloca en determinada clase, identificada con una letra. Las propiedades de la construcción eléctrica y mecánica el rotor, en las cinco clases NEMA de motores de inducción de jaula de ardilla, se resume en la siguiente tabla:
MOTORES DE INDUCCION DE JAULA DE ARDILLA CLASE A
El motor clase A es un motor de jaula de ardilla normal o estándar fabricado para uso a velocidad constante. Tiene grandes áreas de ranuras para una muy buena disipación de calor, y barras con ranuras ondas en el motor. Durante el periodo de arranque, la densidad de corriente es alta cerca de la superficie del rotor; durante el periodo de la marcha, la densidad se distribuye con uniformidad. Esta diferencia origina algo de alta resistencia y baja reactancia de arranque, con lo cuál se tiene un par de arranque entre 1.5 y 1.75 veces el nominal ( a plena carga). El par de arranque es relativamente alto y la baja resistencia del rotor producen una aceleración bastante rápida hacia la velocidad nominal. Tiene la mejor regulación de velocidad pero su corriente de arranque varía entre 5 y 7 veces la corriente nominal normal, haciéndolo menos deseable para arranque con línea, en especial en los tamaños grandes de corriente que sean indeseables.
Motores de inducción de jaula de ardilla clase B
A los motores de clase B a veces se les llama motores de propósito general; es muy parecido al de la clase A debido al comportamiento de su deslizamiento-par. Las ranuras de su motor están embebidas algo más profundamente que el los motores de clase A y esta mayor profundidad tiende a aumentar la reactancia de arranque y la marcha del rotor. Este aumento reduce un poco el par y la corriente de arranque.
Las corrientes de arranque varían entre 4 y 5 veces la corriente nominal en los tamaños mayores de 5 HP se sigue usando arranque a voltaje reducido. los motores de clase B se prefieren sobre los de la clase A para tamaños mayores.
Las aplicaciones típicas comprenden las bombas centrífugas de impulsión, las máquinas herramientas y los sopladores.
MOTORES DE INDUCCION DE JAULA DE ARDILLA CLASE C
Estos motores tienen un rotor de doble jaula de ardilla, el cual desarrolla un alto par de arranque y una menor corriente de arranque.
Debido a su alto par de arranque, acelera rápidamente, sin embargo cuando se emplea en grandes cargas, se limita la disipación térmica del motor por que la mayor parte de la corriente se concentra en el devanado superior.
En condiciones de arranque frecuente, el rotor tiene tendencia a sobre calentarse se adecua mejor a grandes cargas repentinas pero de tipo de baja inercia.
MOTORES DEINDUCCION DE JAULA DE ARDILLA CLASE D
Los motores comerciales de inducción de jaula de ardilla clase D se conocen también como de alto par y alta resistencia.
Las barras del rotor se fabrican en aleación de alta resistencia y se colocan en ranuras cercanas a la superficie o están embebidas en ranuras de pequeño diámetro. La relación de resistencia a reactancia del rotor de arranque es mayor que en lo motores de las clases anteriores.
El motor está diseñado para servicio pesado de arranque, encuentra su mayor aplicación con cargas como cizallas o troqueles, que necesitan el alto par con aplicación a carga repentina la regulación de velocidad en esta clase de motores es la peor.
MOTORES DE INDUCCIÓN DE JAULA DE ARDILLA DE CLASE F
También conocidos como motores de doble jaula y bajo par. Están diseñados principalmente como motores de baja corriente, porque necesita la menor corriente de arranque de todas las clases. Tiene una alta resistencia del rotor tanto en su devanado de arranque como en el de marcha y tiende a aumentar la impedancia de arranque y de marcha, y a reducir la corriente de marcha y de arranque.
El rotor de clase F se diseño para remplazar al motor de clase B. El motor de clase F produce pares de arranque aproximadamente 1.25 veces el par nominal y bajas corrientes de arranque de 2 a 4 veces la nominal. Los motores de esta clase se fabrican de la capacidad de 25 hp para servicio directo de la línea. Debido a la resistencia del rotor relativamente alta de arranque y de marcha, estos motores tienen menos regulación de voltaje de los de clase B, bajan capacidad de sobrecarga y en general de baja eficiencia de funcionamiento. Sin embargo , cuando se arrancan con grandes cargas, las bajas de corrientes de arranque eliminan la necesidad de equipo para voltaje reducido, aún en los tamaños grandes.
CLASIFICACIÓN DE LOS MOTORES DE INDUCCIÓN DE JAULA DE ARDILLA DE ACUERDO CON EL ENFRIAMIENTO Y EL AMBIENTE DE TRABAJO.
Los motores comerciales de inducción de jaula de ardilla, y en general todos lo motores eléctricos , se pueden clasificar también de acuerdo con el ambiente en que funcionan, sí también como en los métodos de enfriamiento.
La temperatura ambiente juega un papel importante en la capacidad y selección del tamaño de armazón para una dínamo, parte importante del motivo es que la temperatura ambiente influye en la elevación permisible de temperatura por sobre los 40º C normales. Por ejemplo una dínamo que trabaje a una temperatura ambiente de 75º C empleando aislamiento clase B tiene un aumento permisible de temperatura de tan solo 55º C. Si trabajara a su temperatura ambiente normal de 40 º C se podría permitir un aumento de temperatura de 90º C, sin dañar su aislamiento.
También se hizo notar que la hermeticidad de la máquina afecta a su capacidad. Una máquina con una armazón totalmente abierta con un ventilador interno en su eje, permite un fácil paso de aire succionado y arrojado. Esta caja origina una temperatura final de trabajo en los devanados, menor en comparación que la de una máquina totalmente cerrada que evita el intercambio de aire con el exterior.
Esto da como resultado que existe una clasificación de los motores por el tipo de carcaza.
TIPOS DE ENVOLVENTES O CARCAZAS.
La NEMA reconoce los siguientes:
1.carcaza a prueba de agua. Envolvente totalmente cerrada para impedir que entre agua aplicada en forma de un chorro o manguera, al recipiente de aceite y con medios de drenar agua al interior. El medio para esto último puede ser una válvula de retención o un agujero machuelado en la parte más inferior del armazón, para conectar un tipo de drenado.
2.carcaza a prueba de ignición de polvos. Envolvente totalmente cerrada diseñada y fabricada para evitar que entren cantidades de polvo que puedan encender o afectar desempeño o capacidad.
3.carcaza a prueba de explosión. Envolvente totalmente cerrada diseñada y construida para resistir una explosión de un determinado gas o vapor que pueda estar dentro de un motor, y también para evitar la ignición de determinado gas o vapor que lo rodee, debido a chispas o llamaradas en su interior.
4.carcaza totalmente cerrada envolvente que evita el intercambio de aire entre el interior y el exterior de ella pero que no es lo suficiente mente cerrada para poderla considerar hermética al aire.
5.carcaza protegida al temporal. Envolvente abierta cuyos conductos de ventilación están diseñados para reducir al mínimo la entrada de lluvia o nieve y partículas suspendidas en el aire, y el acceso de estas en las partes eléctricas.
6.carcaza protegida. Envolvente abierta en la cual todas las aberturas conducen directamente a partes vivas o giratorias, exceptuando los ejes lisos del motor, tienen tamaño limitado mediante el diseño de partes estructurales o parrillas coladeras o metal desplegado etc. Par< evitar el contacto accidental con las parte vivas
7.Carcaza a prueba de salpicaduras. Envolvente abierta en la que las aberturas de ventilación están fabricadas de tal modo que si caen partículas de sólidos o gotas de líquidos a cualquier ángulo no mayor de 100º con la vertical no puedan entrar en forma directa o por choque de flujo por una superficie horizontal o inclinada hacia adentro.
8.Carcaza a prueba de goteo envolvente abierta en que las aberturas de ventilación se construye de tal modo que si caen partículas sólidas o gotas de líquido a cualquier ángulo no mayor de 15º con la vertical no pueda entrar ya sea en forma directa o por choque y flujo por una superficie horizontal o inclinada hacia adentro.
9.Carcaza abierta envolvente que tiene agujeros de ventilación que permiten el flujo de aire externo de enfriamiento sobre y alrededor de los devanados de la máquina.
El costo y el tamaño de los motores totalmente cerrados es mayor que el de los motores abiertos, de la misma potencia y ciclo de trabajo y elevación sobre la temperatura ambiente.
SELECCIÓN DE VELOCIDADES NOMINALES DEMOTORES DE INDUCCION DE JAULA DE ARDILLA O DE ROTOR DEVANADO.
Dado que el deslizamiento de la mayor parte de los motores comerciales de inducción de jaula de ardilla, a la velocidad nominal en general de alrededor de un 5% , no se pueden alcanzar velocidades mayores a 3600 r.p.m. A 60 Hz, las velocidades son muy múltiplos de los inversos del números de polos en el estator: 1800, 1200, 900, 720 r.p.m. Etc. En general, se prefieren los motores de alta velocidad a los de baja velocidad, de la misma potencia y voltaje, debido a que:
•Son de tamaño menor y en consecuencia de menor peso
•Tienen mayor par de arranque
•Tienen mayores eficiencias
•A la carga nominal, tienen mayores factores de potencia
•Son menos costosos.
Por estas razones se suele dotar de cajas de engranes o embrague a los motores de inducción de jaula de ardilla para permitir velocidades de eje de cerca sobre 3600 r.p.m. y por debajo de 200 r.p.m. En muchos usos o aplicaciones comerciales particularmente en capacidades de menor potencia, la caja de engranes o de embrague va incorporada en la caja del motor, formando unidad integral con este.
EFECTO DE LA VARIACIÓN DE VOLTAJE SOBRE LA VELOCIDAD DE UN MOTOR DE INDUCIDO DE JAULA DE ARDILLA O DE ROTOR DEVANADO.
Si solo hacemos variar el voltaje del estator no se produce una variación correspondiente en el deslizamiento y la velocidad. Entonces si los demás factores permanecen constantes, el par del motor es directamente proporcional al cuadrado del voltaje. Esto significa que si se aumenta el voltaje en el estator , se produce un aumento mucho mayor en el par y, correspondientemente, una reducción en el desplazamiento, es decir el deslizamiento varía inversamente con el cuadrado del voltaje o en proporción al inverso del par.
Para fines de cálculo, podemos resumir la relación entre par y voltaje de estator como sigue:
En el cual el subíndice "n" representa el nuevo valor
El subíndice "o" representa el valor original.
El cálculo del deslizamiento con un cambio en el voltaje del estator (y del rotor) es un tanto más complejo, porque el deslizamiento varía también con la resistencia del rotor, el voltaje del estator y/o el par. La relación se puede resumir de la siguiente forma: para la cual se ha definido previamente los símbolos y subíndices.
A la siguiente figura se muestra el efecto de una reducción en el voltaje del estator sobre la curva característica par- deslizante
De un motor de inducción de jaula de ardilla de propósito general. Al voltaje nominal del estator Vs, el motor entrega el par niminal a un desplazamiento aproximado de 5 %, lo cual se ve en el punto a de la figura a una reducción del 80 % del voltaje del estator, suponiendo una carga convencional cuyo par varíe con la velocidad, disminuyen tanto el par como la velocidad,, con lo cual se tiene un aumento en el deslizamiento , como se muestra en el punto b. Una reducción semejante de voltaje produce tanto la reducción en el par como aumento en el desplazameinmto en el punto c. La extrapolación de los puntos a, b, y c produce la línea de carga que aparece punteada para mayores reducciones en el voltaje del estator.
Por tanto si se tiene mayor calentamiento a la menor velocidad, así como una eficiencia reducida, lo cuál causa un rápido deterioro en el aislamiento del motor. Por tanto se acostumbra limitar la variación de voltaje sobre el par, el deslizamiento y la velocidad, empleando las ecuaciones 1 y 2
El siguiente ejemplo muestra que tanto resiste la velocidad de un motor comercial de inducción de jaula de ardilla a un cambio de voltaje en el estator. Como se muestra en la parte (d) de ese ejemplo, cuando se reduce 10 % el voltaje del estator, tan solo produce ¡una disminución de 1.23% en la velocidad!
Ejemplo 1
Un motor de jaula de ardilla trifásico , 10hp, cuatro polos, 220 V, produce un par de 30 lb pie a la velocidad nominal de 1710 r.p.m. calcular.
a.el desplazamiento y velocidad nuevos a un voltaje impreso en el estator igual a 242 V
b.repetir parte (a) a 198 V
c.el cambio porcentual en el deslizamiento y velocidad debido a un cambio de voltaje en la parte (a)
d.el cambio porcentual en el deslizamiento y velocidad debido a un cambio de voltaje en la parte (b)
solución