Estos son los vehiculos que la NASA esta probando en el desierto para sus futuras misiones a la Luna y Marte.
Centauro y Robonaut2
NASA JSC ha desarrollado una serie de rovers Centauro para llevar a la parte superior de los Robonaut y otras cargas.

Robonaut 2
Centauro 1 fue desarrollado para trabajar con el torso humanoide Robonaut R1B superior en 2006.

Robonaut R1B on Centaur 1 at Desert RATS
Centauro 2 rover fue desarrollado en 2010 por los sistemas de robótica Humanos (HRS) del proyecto como parte del desarrollo de la tecnología de exploración y de demostración, y ahora se ha integrado con el torso Robonaut R2A.

Centaur 2 at Desert RATS in 2010
Esta combinación se mezcla el estado de la técnica de la movilidad robótica con el sistema mundial de la manipulación más avanzada.
Sistemas híbridos de robot / brazo, comúnmente conocida como manipulación de móviles, representan un nuevo campo de investigación en robótica.
La Manipulación móvil es una importante nueva tecnología del espacio con múltiples aplicaciones para mejorar la vida en la Tierra.
Nuevo sistema de la NASA Centaur2/Robonaut2 es un banco de pruebas ideal para esta investigación y las posiciones de la agencia como líder tecnológico.

Robonaut R2A on Centaur 2
Centauro 2 tiene varias tecnologías avanzadas, incluyendo un nuevo sistema de suspensión activa con control de la fuerza, la articulación del cuerpo, de alto rendimiento (330V, 30 Amp) integrado controladores de motores, aislamiento térmico y de polvo, aviónica integrados en las piernas, la línea de sustitución de aviónica del cuerpo de la unidad de EVA o mantenimiento de robótica, en centro de accionamiento de la rueda, y una nueva configuración de la dirección al estilo cangrejo.
Estas tecnologías espaciales son importantes para el futuro de rovers de la NASA, así como las aplicaciones terrestres en vehículos eléctricos y vehículos robóticos.

El torso de Robonaut 2 se ha integrado como una nueva carga útil, e integrado con los sistemas eléctricos y de datos del Centauro 2 rover.
Lunar Electric Rover
El Electric Rover lleva un total de doce ruedas y sólo tiene capacidad para dos astronautas. La velocidad máxima que puede alcanzar es de 25 kilómetros por hora, una cifra más que generosa para viajar por la rugosa superficie lunar.
Una de las ventajas de este vehículo es que está completamente presurizado, con lo que los astronautas podrán desplazarse por su interior sin el clásico traje especial que salva la gravedad cero.
Otra de las sorpresas que trae consigo el Electric Rover es un dispositivo para cargar las baterías que lo alimentan, gracias a la energía generada con los ejercicios físicos que los astronautas realizan a diario.


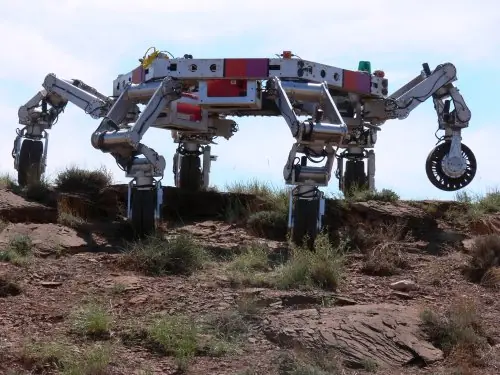
Tri-ATHLETE
El vehículo de carga pesada Rover de la NASA Tri-ATHLETE seria utilizado para llevar las cargas pesadas en los viajes para para explorar la superficie de la Luna y Marte.


Centauro y Robonaut2
NASA JSC ha desarrollado una serie de rovers Centauro para llevar a la parte superior de los Robonaut y otras cargas.
Robonaut 2
Centauro 1 fue desarrollado para trabajar con el torso humanoide Robonaut R1B superior en 2006.
Robonaut R1B on Centaur 1 at Desert RATS
Centauro 2 rover fue desarrollado en 2010 por los sistemas de robótica Humanos (HRS) del proyecto como parte del desarrollo de la tecnología de exploración y de demostración, y ahora se ha integrado con el torso Robonaut R2A.
Centaur 2 at Desert RATS in 2010
Esta combinación se mezcla el estado de la técnica de la movilidad robótica con el sistema mundial de la manipulación más avanzada.
Sistemas híbridos de robot / brazo, comúnmente conocida como manipulación de móviles, representan un nuevo campo de investigación en robótica.
La Manipulación móvil es una importante nueva tecnología del espacio con múltiples aplicaciones para mejorar la vida en la Tierra.
Nuevo sistema de la NASA Centaur2/Robonaut2 es un banco de pruebas ideal para esta investigación y las posiciones de la agencia como líder tecnológico.
Robonaut R2A on Centaur 2
Centauro 2 tiene varias tecnologías avanzadas, incluyendo un nuevo sistema de suspensión activa con control de la fuerza, la articulación del cuerpo, de alto rendimiento (330V, 30 Amp) integrado controladores de motores, aislamiento térmico y de polvo, aviónica integrados en las piernas, la línea de sustitución de aviónica del cuerpo de la unidad de EVA o mantenimiento de robótica, en centro de accionamiento de la rueda, y una nueva configuración de la dirección al estilo cangrejo.
Estas tecnologías espaciales son importantes para el futuro de rovers de la NASA, así como las aplicaciones terrestres en vehículos eléctricos y vehículos robóticos.
El torso de Robonaut 2 se ha integrado como una nueva carga útil, e integrado con los sistemas eléctricos y de datos del Centauro 2 rover.
Lunar Electric Rover
El Electric Rover lleva un total de doce ruedas y sólo tiene capacidad para dos astronautas. La velocidad máxima que puede alcanzar es de 25 kilómetros por hora, una cifra más que generosa para viajar por la rugosa superficie lunar.
Una de las ventajas de este vehículo es que está completamente presurizado, con lo que los astronautas podrán desplazarse por su interior sin el clásico traje especial que salva la gravedad cero.
Otra de las sorpresas que trae consigo el Electric Rover es un dispositivo para cargar las baterías que lo alimentan, gracias a la energía generada con los ejercicios físicos que los astronautas realizan a diario.
Tri-ATHLETE
El vehículo de carga pesada Rover de la NASA Tri-ATHLETE seria utilizado para llevar las cargas pesadas en los viajes para para explorar la superficie de la Luna y Marte.