El V1 y V1.5 Tricopter
Entonces, ¿qué es un Tricopter?

Es una aeronave similar a un helicóptero excepto que tiene tres discos del rotor. La belleza del diseño es que tres Outrunners ordinarias directas de conducción hélices ordinarias se pueden utilizar. Cuatro helicópteros giroscopios hace el establo tricopter super. Y para hacerlo guiñar un servo inclina el motor hacia atrás. Usted fija su radio de 120 º CCPM y su buena para ir. Es tan simple como eso. Parte muy bajo recuento, simple, barato, fácil de construir sin electrónica avanzada necesarios.
Es una aeronave similar a un helicóptero excepto que tiene tres discos del rotor. La belleza del diseño es que tres Outrunners ordinarias directas de conducción hélices ordinarias se pueden utilizar. Cuatro helicópteros giroscopios hace el establo tricopter super. Y para hacerlo guiñar un servo inclina el motor hacia atrás. Usted fija su radio de 120 º CCPM y su buena para ir. Es tan simple como eso. Parte muy bajo recuento, simple, barato, fácil de construir sin electrónica avanzada necesarios.
¿Qué comprar?
Después de probar varios controladores de velocidad, motores, giroscopios, etc Estos son los componentes electrónicos que recomiendo la compra de un peso inferior a 1,2 kg tricopter:
3 x 800 kV 2213N motores sin escobillas
3 x TURNIGY Plush controladores de velocidad 18amp
4 x Hobby King 401B AVCS Gyro Digital Lock Head
1 x 6 pack GWS 10 * 4.7 hélices
1 x 10 paquetes adaptadores prop
1 x BMS-385DMAX Digital Servo (Metal Gear)
1 x 2200mAh LiPo 3S Turnigy
1 x Turnigy UBEC para hacer el "starter salto" para los gyros
Se trata de la electrónica que conozco un buen trabajo en una Tricopter y probado personalmente.
El Build
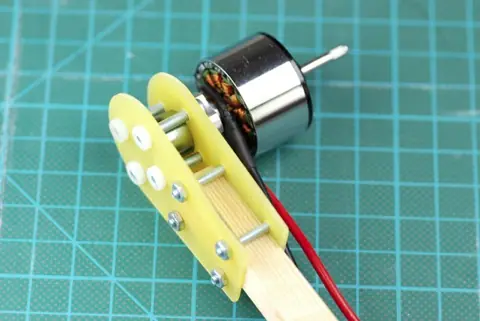
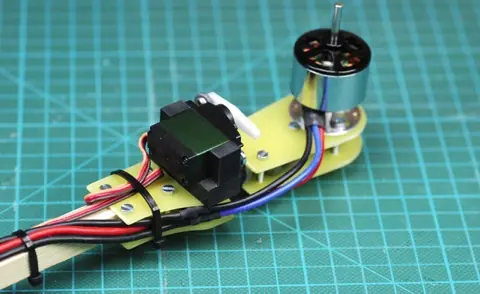
Ahora vamos a la construcción inicial. Solía DIY PCB 1.5mm laminado de fibra de vidrio para la fabricación de los soportes del motor.


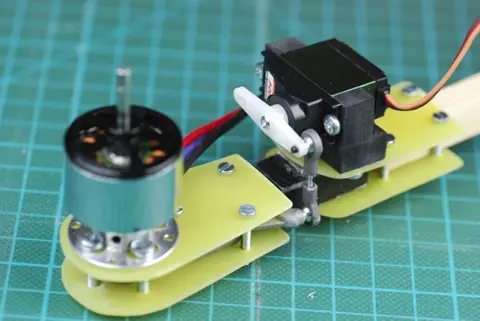
Esta es mi solución para el motor de inclinación hacia atrás. Es un agarre T-Rex 450 cuchilla montada en una pieza de plástico.
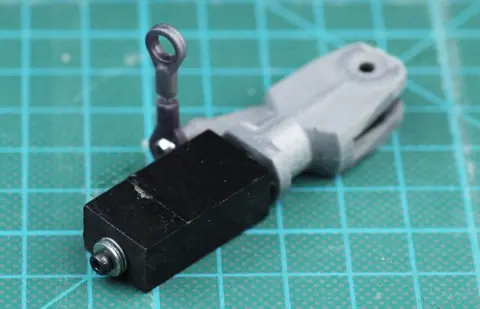
Es súper baja fricción que espero que me dé un mecanismo de inclinación slop libre.
La parte posterior del motor de prueba montaje equipado con el mecanismo de inclinación.

He utilizado un T-Rex 450 tailboom que tenía por ahí para hacer un relleno de peso ligero de manera que el laminado de fibra de vidrio no se flexiona cuando atornillar el motor.

Hice un montaje servo simple para obtener el servo a la altura adecuada y que sea fácil de quitar.
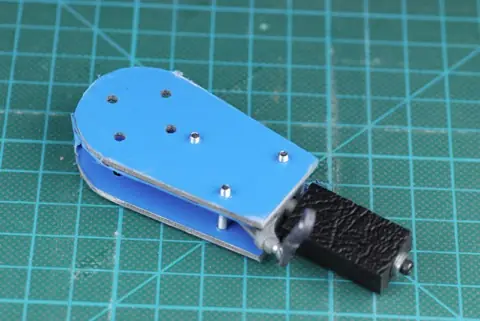
Aquí están las placas de servos que también posee el mecanismo de inclinación.
Para quitar peso I ataque químico del cobre a partir de la fibra de vidrio laminados

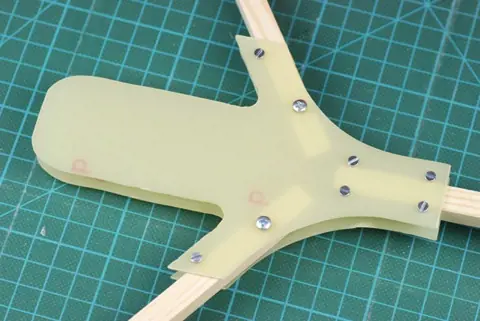
Compruebe el montaje del soporte del motor.
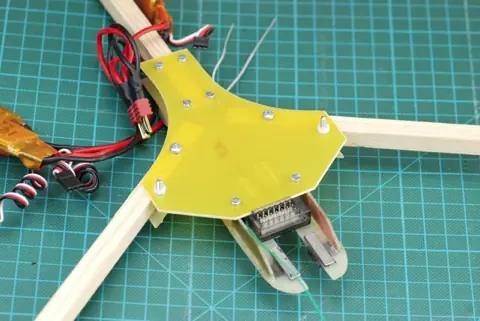
Resultó bastante agradable. Me va a utilizar la madera como los brazos y como se puede ver en la imagen, el montaje es simplemente atornillado, sujetando la madera. Esto hace que sea muy fácil para adaptarse a nuevas armas si alguna vez frenar una o quieres probar los más largos.
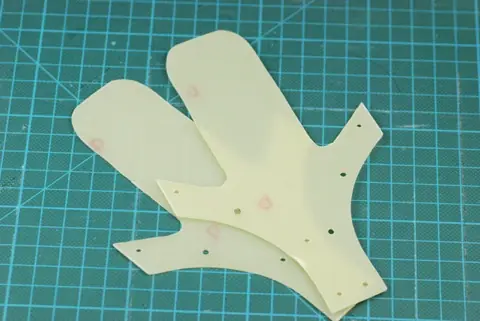
Este es mi diseño del marco. No es súper bonita, pero espero que lo haga el trabajo.
Mi tricopter va a ser plegable, así que perforó un agujero a través de los dos brazos delanteros.
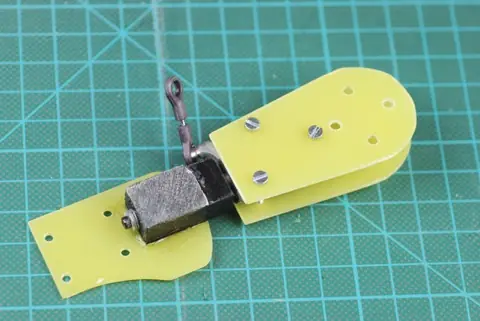
El mecanismo de inclinación casi hecho. He tenido que añadir un trozo de plástico para que sea tan grueso como los brazos.
Mecanismo de inclinación por hacer.
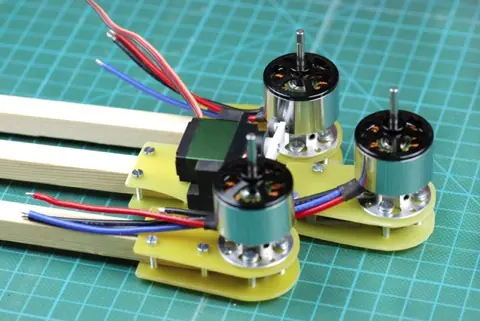
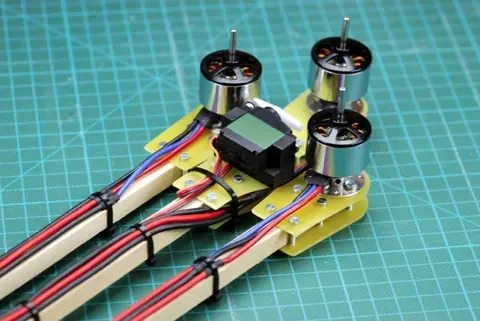
Motor monta hecho.
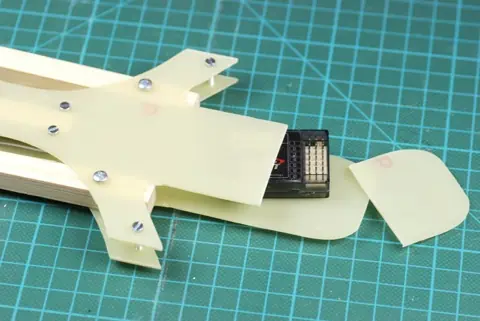
I cortado de una pieza de la pieza superior del bastidor para poder montar el receptor en-entre las láminas para laminado de 1,5 mm de fibra de vidrio.
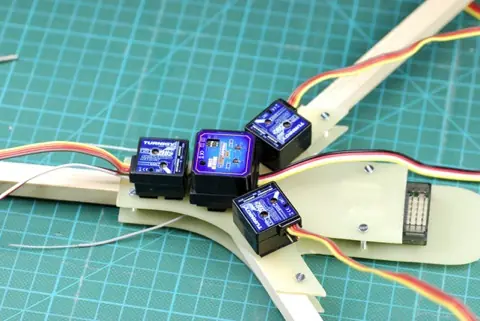
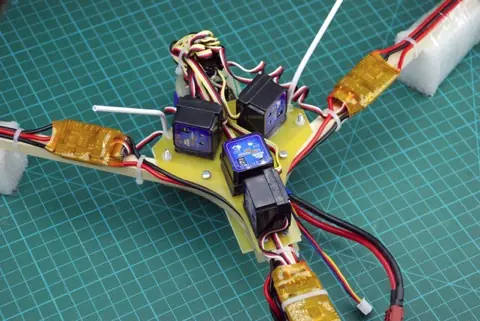
Gyros en su lugar.

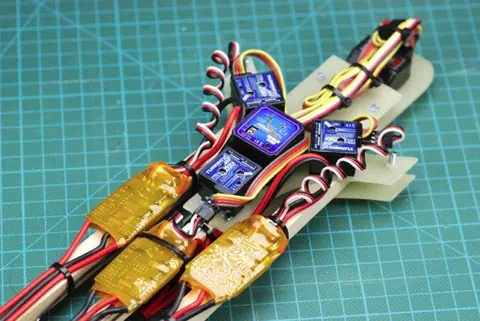
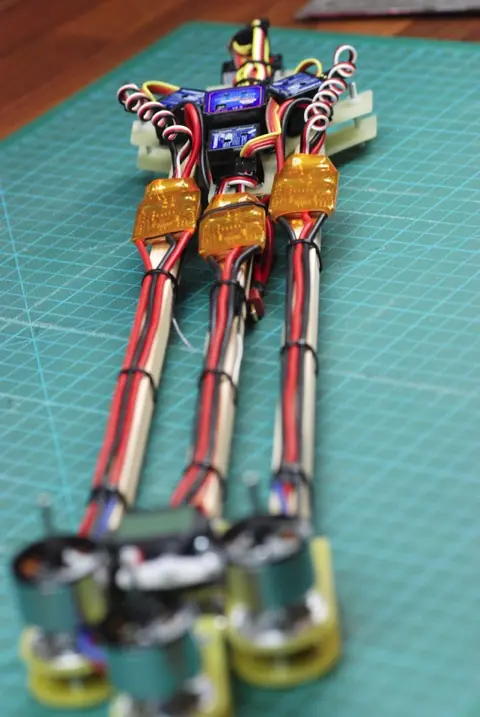
Los trabajos se iniciaron en la ampliación de los cables en todos los CES. Antes y después.

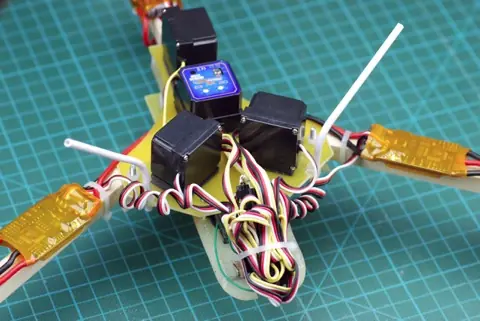
Toda la electrónica en su lugar.
Por alguna razón, los giroscopios Turnigy no funcionaba bien con el receptor Futaba yo había planeado utilizar. Creo que tiene algo que ver con la tasa más corto marco Futaba 2.4GHz sistema utiliza. Se hizo que la salida de los giroscopios se vuelven locos en algunos puntos, por lo que ahora utilizo un receptor Assan 6 canales.
Incline solución mecanismo cable.

Inferior del bastidor.
Las armas cuando el tricopter se pliega para el transporte.
El marco cuando está plegado para el transporte.

Tiempo para un vuelo de prueba!

Vuela!

Hecho.

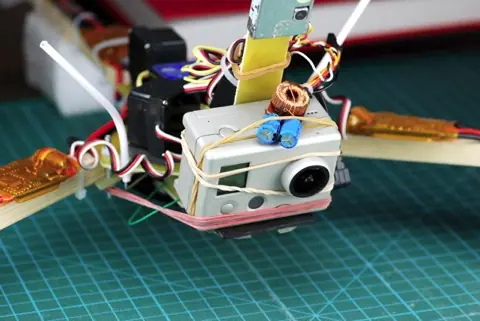
Los engranajes del dosel y el aterrizaje son de un viejo T-Rex 450. Yo simplemente recortar un poco y lo pintó de naranja.





Creo que salió bastante bien, si se me permite decirlo yo mismo.

Ahora es el momento de llevarlo al torneo bajo techo!
Este es el vuelo de estreno del torneo bajo techo;
Después de probar varios controladores de velocidad, motores, giroscopios, etc Estos son los componentes electrónicos que recomiendo la compra de un peso inferior a 1,2 kg tricopter:
3 x 800 kV 2213N motores sin escobillas
3 x TURNIGY Plush controladores de velocidad 18amp
4 x Hobby King 401B AVCS Gyro Digital Lock Head
1 x 6 pack GWS 10 * 4.7 hélices
1 x 10 paquetes adaptadores prop
1 x BMS-385DMAX Digital Servo (Metal Gear)
1 x 2200mAh LiPo 3S Turnigy
1 x Turnigy UBEC para hacer el "starter salto" para los gyros
Se trata de la electrónica que conozco un buen trabajo en una Tricopter y probado personalmente.
El Build
Ahora vamos a la construcción inicial. Solía DIY PCB 1.5mm laminado de fibra de vidrio para la fabricación de los soportes del motor.
Esta es mi solución para el motor de inclinación hacia atrás. Es un agarre T-Rex 450 cuchilla montada en una pieza de plástico.
Es súper baja fricción que espero que me dé un mecanismo de inclinación slop libre.
La parte posterior del motor de prueba montaje equipado con el mecanismo de inclinación.
He utilizado un T-Rex 450 tailboom que tenía por ahí para hacer un relleno de peso ligero de manera que el laminado de fibra de vidrio no se flexiona cuando atornillar el motor.
Hice un montaje servo simple para obtener el servo a la altura adecuada y que sea fácil de quitar.
Aquí están las placas de servos que también posee el mecanismo de inclinación.
Para quitar peso I ataque químico del cobre a partir de la fibra de vidrio laminados
Compruebe el montaje del soporte del motor.
Resultó bastante agradable. Me va a utilizar la madera como los brazos y como se puede ver en la imagen, el montaje es simplemente atornillado, sujetando la madera. Esto hace que sea muy fácil para adaptarse a nuevas armas si alguna vez frenar una o quieres probar los más largos.
Este es mi diseño del marco. No es súper bonita, pero espero que lo haga el trabajo.
Mi tricopter va a ser plegable, así que perforó un agujero a través de los dos brazos delanteros.
El mecanismo de inclinación casi hecho. He tenido que añadir un trozo de plástico para que sea tan grueso como los brazos.
Mecanismo de inclinación por hacer.
Motor monta hecho.
I cortado de una pieza de la pieza superior del bastidor para poder montar el receptor en-entre las láminas para laminado de 1,5 mm de fibra de vidrio.
Gyros en su lugar.
Los trabajos se iniciaron en la ampliación de los cables en todos los CES. Antes y después.
Toda la electrónica en su lugar.
Por alguna razón, los giroscopios Turnigy no funcionaba bien con el receptor Futaba yo había planeado utilizar. Creo que tiene algo que ver con la tasa más corto marco Futaba 2.4GHz sistema utiliza. Se hizo que la salida de los giroscopios se vuelven locos en algunos puntos, por lo que ahora utilizo un receptor Assan 6 canales.
Incline solución mecanismo cable.
Inferior del bastidor.
Las armas cuando el tricopter se pliega para el transporte.
El marco cuando está plegado para el transporte.
Tiempo para un vuelo de prueba!
Vuela!
Hecho.
Los engranajes del dosel y el aterrizaje son de un viejo T-Rex 450. Yo simplemente recortar un poco y lo pintó de naranja.
Creo que salió bastante bien, si se me permite decirlo yo mismo.
Ahora es el momento de llevarlo al torneo bajo techo!
Este es el vuelo de estreno del torneo bajo techo;
Es una alegría para volar! Así estable y de perdón. Creo que va a hacer una gran plataforma FPV.
Especificaciones del Tricopter:
Motores: 2213N 800kV AXN
CES: Supersimple tarjeta programable 18A
Batería: 3s Turnigy 25-35C 2200mAh Li-Po
Servo: Power HD 2216MG Digital
Props: GWS 1047
Potencia: 10.2A @ 11.6V - 6370RPM - 780 gramos de empuje / motor !
Tamaño: 40 cm de radio (de centro a motoraxel)
Todo el peso máximo: 777 gramos
Tiempo de vuelo: 15 minutos
Consumo de corriente durante elemento emergente: ~ 8A
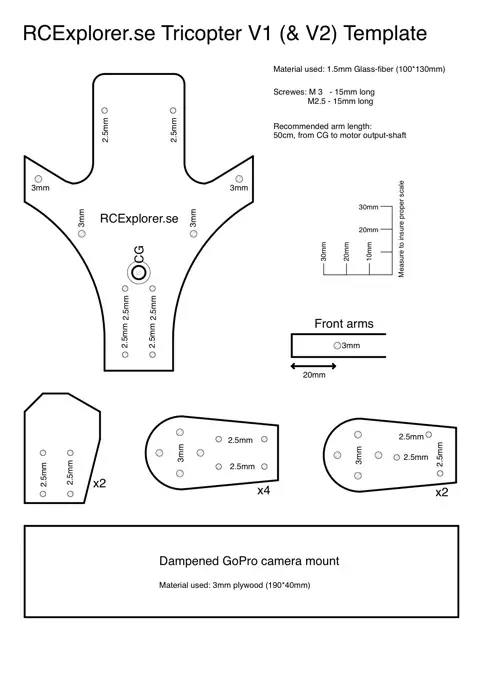
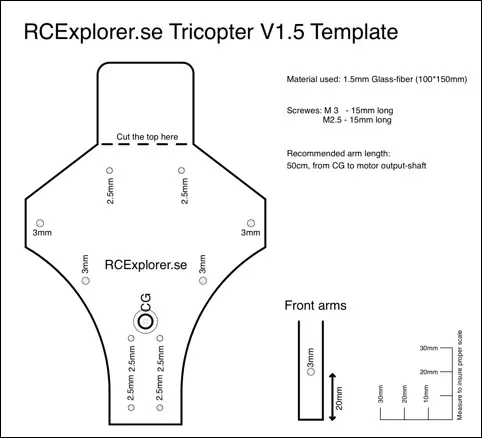
Porque tú lo pediste, aquí está la plantilla en PDF de las placas centrales y motor:
http://rcexplorer.se/wp-content/uploads/2012/09/Tricoptertemplate.pdf
¿Quieres crear tu propio Tricopter pero no sé cómo lo configuro?
Tricopter V1 y V1.5 guía de configuración
Miércoles, 10 de marzo 2010 Publicado por RCExplorer - David
Mucha gente me ha pedido que haga una guía sobre cómo todo está conectado y la configuración, así que aquí está. El tricopter se controla de la misma manera exacta como plato cíclico CCPM 120 º en un helicóptero normal. Lo que quiere decir que cuando quiera que el tricopter para seguir adelante (ascensor) los motores de dos frentes se ralentiza y las velocidades de espalda una para arriba, cuando usted quiere que vaya a la derecha (alerones) las velocidades del motor izquierdo hacia arriba y la derecha se ralentiza y viceversa. Esto significa que conecte los tres speedcontollers al igual que lo haría con los tres servos del plato cíclico en un 120 °. En mi configuración Futaba significa que dejó motor canal 1, canal 2, motor trasero y el canal derecho del motor 6 (mirando el tricopter de la espalda, la cola hacia arriba).

Si se va a tratar de volar un tricoper sin giroscopios que probablemente se bloqueaba inmediatamente. Esto es porque cada motor tiene kV poco diferente y el del CES no se corresponden perfectamente. Esto significa que cada motor reacciona de manera diferente a la del acelerador de entrada y no girar a la misma RPM. Incluso si tienes que recortar a la perfección, una tricoper no es un avión de auto estabilización. No quiero quedarme agradable y nivel. Quiere que deje de funcionar. Sería un buen puñado simplemente para mantenerlo en un vuelo estacionario, sobre todo si había una brisa exterior. Esta es la razón por un giroscopio en cada motor se utiliza, para que sea estable y fácil de volar.

Un giroscopio se hace para contrarrestar cualquier aceleración en el eje que el sensor está midiendo. Así que si una fuerza (como el viento) trata de inclinar el brazo izquierdo hacia arriba de los tricopter, el giroscopio en el brazo hace que el motor disminuya su velocidad suficiente para evitar que el brazo de la aceleración hacia arriba. Cada uno de los giroscopios no tienen idea de los giroscopios otros en el tricopter y sólo mantener rumbo de su propio motor. Esta es la razón por los giroscopios necesita ser montado en el mismo ángulo que los brazos que sujeta el motor, por lo que compensar en el eje derecho.
Los giroscopios que controlan los motores deben estar en modo de índice. Si la partida se utiliza el modo de espera de los giroscopios a tratar de luchar contra cada otro final, inevitable en un accidente. La forma más sencilla de saber si un gyro es en la partida espera o modo de velocidad es conectar un servo y ver si se arrastra en cualquier dirección. Otra prueba consiste en mover el giroscopio para ver si el servo se mueve a su posición máxima y si se vuelve a la posición neutra o no cuando se deja de mover el giroscopio. Si está en el modo de velocidad del servo sólo se mueve cuando se mueve el giróscopo y vuelve al centro cuando se deja de mover el giroscopio, por lo que si se mueve o no vuelve a la posición neutra debe cambiar el modo (que se realiza invirtiendo la ganancia) .
La cola (guiñada) de la tricopter es controlado por la inclinación del motor de nuevo a la izquierda o la derecha.

Esto se hace por un servo como en un helicóptero normal, y como en un helicóptero normal de un giroscopio se utiliza en este eje también. Esto hace un total de giroscopios en un tricopter a cuatro. Este giro puede utilizarse en cualquier tipo de título o modo de espera, dependiendo de lo que prefieras. (Si usted no sabe cuál prefiere, le recomiendo usar la partida espera.) Gracias a los otros tres giroscopios, el tricopter queda perfectamente nivelado cuando el rotor de cola se inclina y el tricopter gira alrededor de su propio eje.
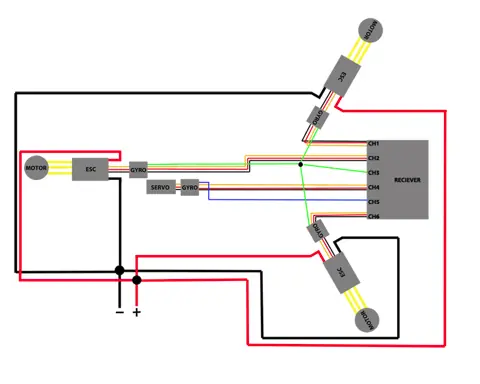
Conexión de todo hasta
Este es un diagrama que muestra cómo todo está conectado en un tricopter (clic para ampliar la imagen): Los tres giroscopios principales están conectados en serie con los CES y los tres alambres giroscópicos de ganancia están conectados entre sí en paralelo en el mismo canal, en mi caso, el canal 3. Esto significa que los tres giroscopios principales tienen la misma sensibilidad del giróscopo. El servo de cola está conectado en serie con el giro de cola y el alambre de ganancia está conectado al canal 5, que es el canal de ganancia del giróscopo en mi sistema Futaba. De esta manera puedo cambiar tanto la ganancia en el giro de cola y los tres giróscopos principales por separado directamente en el transmisor.
Configuración del transmisor
Observe! En el ejemplo siguiente, se necesitan tres servos de su elección (lo que sea que haya por ahí). Estos servos no se necesitan más una vez que la configuración se hace.
Ahora es el momento de programar su radio. Yo uso un Futaba 7C así que eso es lo que voy a utilizar como referencia. Inicio de conmutando al modo helicóptero y definir el ajuste del plato cíclico a 120 º CCPM (HR3). Antes de comenzar, usted debe probar un regulador de velocidad conectado al canal 3, para asegurarse de que tiene las posiciones del acelerador de la manera correcta y no invierte. A continuación, conectar un servo y ver a qué extremo se va. Esto es para que sepas en qué dirección se mueve el servo del acelerador cuando más se aplica. Ahora usted puede utilizar tres servos en lugar de los reguladores de velocidad para arreglar las cosas, ya que es mucho más fácil ver exactamente lo que está sucediendo y mucho menos riesgo de hacerse daño. Conecte los tres servos para canalizar 1,2 y 6 sin los giroscopios. En este momento lo único que quiero saber es que la configuración de swash son correctos, no hay necesidad de agregar variables a liar las cosas. Vaya al menú swash y cambiar la configuración a Aileron +40, +40 y Elevador Pitch +100.
Mueva hacia arriba la palanca del gas, los tres servos deben estar moviéndose hacia arriba. Si no es así, vaya al menú de marcha atrás y revertir el canal que se está moviendo por el camino equivocado. Inténtelo de nuevo. Cuando todos los servos se mueven hacia arriba cuando usted aumenta su acelerador puede continuar con el siguiente paso. Si todos los servos se mueven en sentido contrario cambiar el ajuste de tono en el menú swash a -100 en lugar de 100.
Mueva el stick de gas en torno a la mitad y manténgalo así. A continuación, mueva el stick del alerón (stick izquierdo) hacia la derecha, el servo conectado al canal 6 debe moverse hacia abajo, lo que indica menos del acelerador, y el servo conectado al canal 1 debe moverse hacia arriba, lo que indica mayor acelerador. Si se invierte entrar en el menú swash y cambiar la configuración de alerones a -40 en lugar de 40. Inténtelo de nuevo. Hay que mover la forma en estos momentos. El servo conectado al canal 2 no debe moverse en absoluto.

Mueva el stick (palo izquierdo) hacia adelante, el servo conectado al canal 2 debe moverse hacia arriba (más gas) y los servos del canal 1 y 6 deberían moverse hacia abajo (menos del acelerador). Si se invierte cambiar la configuración Ascensor a -40 en lugar de 40.
Estos son los valores que terminé con:
No servos invertidos
Swash Ail +40, -40 ELE, PIT 100
Es hora de crear los tres giróscopos principales. Conectar el ellos en serie con los servos y conecte los tres cables giroscópicos de ganancia para el canal 3. Esto hará las cosas mucho más fácil si usted tiene los giroscopios colocados en el marco de esta etapa. Establezca su curva de gas a 0% y mover un giroscopio para comprobar si está en rumbo modo de retención. Si está en modo de retención título, ajuste la curva del motor a 100%, en lugar de cambiar al modo de los giroscopios tasa de cambio. Ahora toque el bastidor en la misma dirección que uno de los brazos y mantener un ojo en el servo conectado a ese brazo. Cuando se incline hacia abajo el brazo del servo debe moverse hacia arriba (más del acelerador) para compensar. Si no es necesario cambiar el interruptor DIP poco en el llamado giro dirección servo, revocada, o algo similar. Intente de nuevo para asegurarse de que se mueve en la dirección correcta. Repetir esto con los otros dos brazos.
Verifique que el servo de cola se mueve de la manera correcta cuando se mueve la palanca del timón. Si no invierte canal 4 en el radio. Ajuste la ganancia del gyro (canal 5) al 0% y comprobar si el giro es en la partida modo espera, si no se establece la ganancia del 100% en su lugar. Compruebe que el giróscopo compensa en la dirección correcta moviendo la cola en una dirección, el servo debe dar tirar en la dirección opuesta. Si no puede revertir el cambio de dirección en el giroscopio.
Estamos casi listos ahora. Establecer todo el punto de la curva de gas y el 30% (70% si tiene que invertir el canal 3 para obtener los giroscopios en el modo de cambio). Este es un buen punto de partida para su primer salto con el tricopter.
Haga el ajuste de giro en la cola y el 20% (o el 80% si se invierte el canal 5 para entrar en modo Heading hold).
Completa tu formación y conectar todo de acuerdo con el diagrama anterior. Asegúrese de comprobar bien todo. Cada vez que inicie el tricopter hay que recalibrar los puntos finales del acelerador en los controladores de velocidad. Esto es para asegurarse de que todos tienen los mismos extremos exactas. Así que para poner en marcha su poder tricopter primero el transmisor y restablecer todos los ajustes, a continuación, mueva la palanca del acelerador a la posición máxima (velocidad máxima). Conecte la batería en el tricopter y esperar a que los giroscopios para inicializar. Espere a que los CES a sonar su señal sonora para la entrada de calibración del acelerador y luego mueva la palanca del acelerador a la posición hacia abajo. Los CES debe jugar una melodía que indica que están listos.
Es hora de probar mosca!
Encuentre un espacio abierto muy grande sin viento. El primer vuelo se dedicará a establecer la ganancia del giróscopo. Toma de arriba y conseguir que el efecto suelo (0,5 metros o menos). Si no se tambalee o oscilar, aterrizar y aumentar la ganancia de los giróscopos principales por 2% (por ejemplo al 28% si tiene que 30% antes). Inténtelo de nuevo y repita hasta que usted comienza a conseguir una oscilación débil (los giroscopios exceso de compensación), es la tierra y disminuir la ganancia de un 1% y su hecho! Ahora es lo más estable posible. Haga lo mismo con el giro de cola, pero no se sorprenda si se llega a un 100% sin oscilación.
Mis ajustes de ganancia de corriente: Curva del acelerador 14,5% (giróscopos principales), aumento de Gyro 11% (cola).
Si usted siente que el tricopter es demasiado sensible a mediados de palo se puede añadir un poco de exposición, baje las tasas o bajar el alerón y elevador configuración swash. Me gusta mi tricopter con ajustes de 40% de los alerones y el elevador sin expo y del 100% en todas las tarifas, pero a cada uno lo suyo.
Buena suerte y volar seguro.
Especificaciones del Tricopter:
Motores: 2213N 800kV AXN
CES: Supersimple tarjeta programable 18A
Batería: 3s Turnigy 25-35C 2200mAh Li-Po
Servo: Power HD 2216MG Digital
Props: GWS 1047
Potencia: 10.2A @ 11.6V - 6370RPM - 780 gramos de empuje / motor !
Tamaño: 40 cm de radio (de centro a motoraxel)
Todo el peso máximo: 777 gramos
Tiempo de vuelo: 15 minutos
Consumo de corriente durante elemento emergente: ~ 8A
Porque tú lo pediste, aquí está la plantilla en PDF de las placas centrales y motor:
http://rcexplorer.se/wp-content/uploads/2012/09/Tricoptertemplate.pdf
En primer video FPV del Tricopter:
Configuración:

RC TX: Futaba 7C FASST 2,4 GHz
RX RC: ASSAN 6CH
cámara: 1/3 "Sony CCD cámara ( más info )
Vídeo TX: 1,3 GHz 300 mW, 1/4 Lambda antena
vídeo RX: 1,3 GHz de doble salida
de vídeo RX antena: Stock látigo
OSD: Flytron SimpleOSD XL + GPS
unidad de captura de vídeo: Sandisk V-Mate
Tricopter V1.5
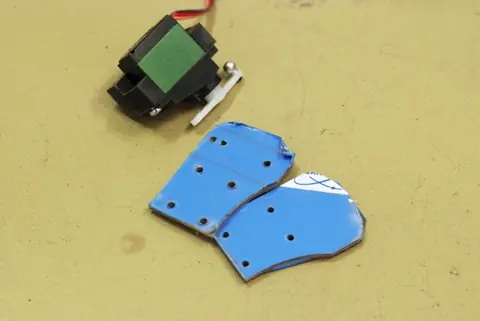
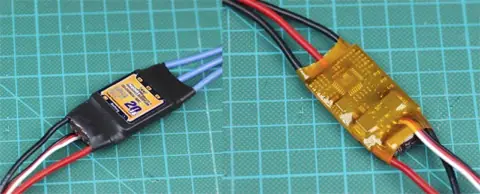
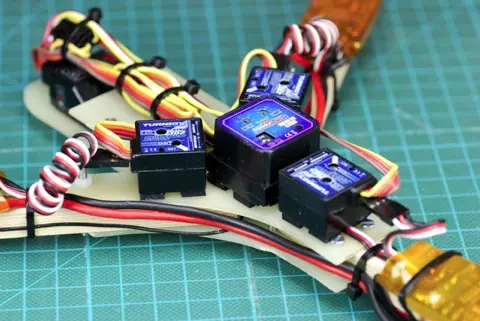
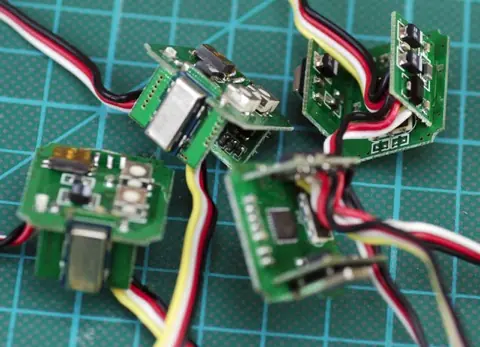
Desde los Trunigy 302 giroscopios no funciona bien con mi receptor Futaba FASST decidí probar con 4 HK401B HobbyKing giroscopios lugar. Me di cuenta de lo viejo que tenía 401 gyro que el interior PCB del caso no estaba asegurada propiamente antes de montar los cuatro giroscopios nuevos que los llevó aparte y les aseguró un better.Here poco es la forma de hacerlo;

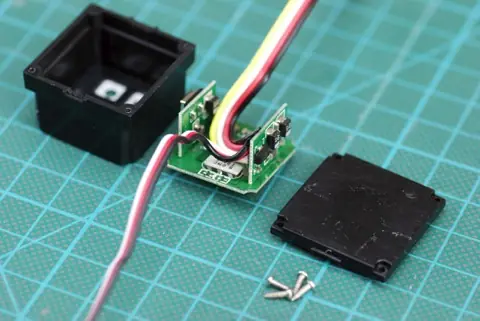
Desenrosque los 4 tornillos inferiores y saque el PCB.
Si quieres ser absoluto seguro de que los cables no están estresados y se rompen en un accidente, use un poco de pegamento caliente para asegurar a la PCB.

Para asegurar el PCB dentro de la caja utilizar una pequeña gota de pegamento caliente en cada esquina de la caja y mientras todavía caliente el lugar de PCB en la caja y empuje hacia abajo hasta que esté fijado.
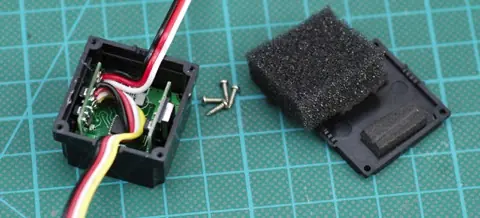
Para hacer absoluto seguro de que el PCB se mantendrá fija usé un pedazo de espuma entre la tapa y el PCB. Ahora atornille el caso juntos y ya está.
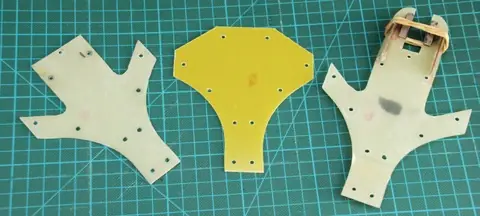
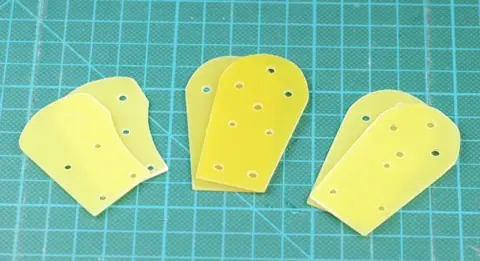
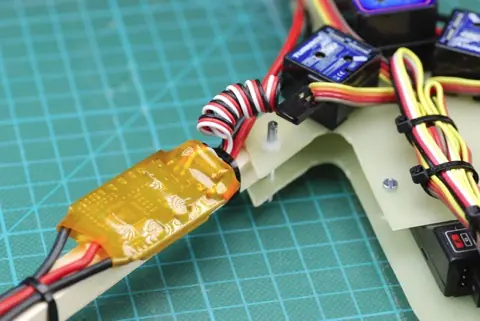
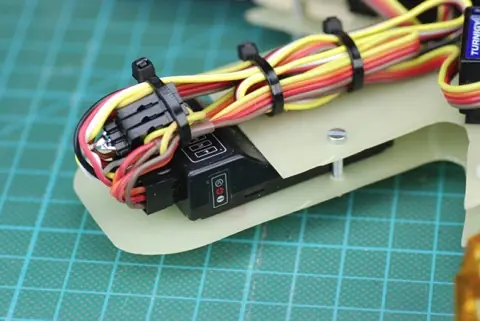
Dado que los gyros HK401 tiene una huella más grande que necesitaba un marco un poco más grande. Pero en lugar de hacer uno totalmente nuevo que simplemente cometió un plato modificado superior.
Futaba FASST receptor montado.
¡Ya está!
Una cosa que noté de inmediato con los giroscopios nuevos es que no se arme el de ESC. Esto es porque ellos no dan una señal válida durante la puesta en marcha de inicialización, esto hace que el ECS de pensar que tiene un receptor de FM sin una señal válida y el del CES entra en modo de protección. Lo que quiere decir que no se inicializa hasta que se reinicia y conseguir una señal válida. Pero si tuviera que reiniciar el ESC son los giroscopios se reiniciará y ya que estoy utilizando el construido en el BEC del ESC y fueron de nuevo al cuadrado uno nuevo. Para resolver este problema, he hecho un BEC externo a "reactivar" el receptor y giroscopios;
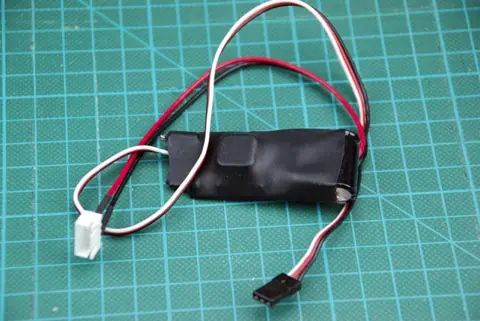
Cuando conecto el BEC externo (con un diodo en serie con la salida posesivo, sólo para estar seguro) en un canal libre en el receptor y conéctelo al conector del saldo de la batería, el BEC sólo se enciende el receptor y gyros . Después de que los giros han inicializado enchufo en el conector de la batería principal, encendiendo la del ESC. Ahora el del CES conseguir una señal válida y arranca muy bien. Luego retire el BEC externo que utiliza para "Jump Start" y ahora puedo disfrutar de mi vuelo.

Es hora de volar!

Vuela!
Comparando el viejo Turnigy 302 giroscopios al nuevo HK401B , el de HK401B son mucho más sensibles a las vibraciones. Pero una vez que deshacerse de las vibraciones de la HK401B realizar un poco mejor que la 302. Se siente más encerrado y aún más estable. El HK401B También se trabaja en el modo digital, a diferencia de la de 302 que hizo que el tirón tricopter horrible en pleno vuelo en momentos aleatorios. Pero la mejor parte es que trabajan muy bien con mi receptor FASST. Estoy contento de haber probado el de HK401B.
En primer lugar FPV HD de vídeo de la HD GoPro héroe ;
Configuración:
RC TX: Futaba 7C FASST 2,4 GHz
RX RC: R606FS
Cámara: GoPro HD Héroe fijado en 720 60FPS
Vídeo TX: 1,3 GHz 300 mW, 1/4 Lambda antena
RX Vídeo: 1.3GHz con filtro SAW modificado
vídeo RX antena: whip Stock
Porque tú lo pediste, aquí está la plantilla en PDF de las placas centrales: http://rcexplorer.se/wp-content/uploads/2012/09/TricoptertemplateV15.pdf Asegúrese de ajustar la escala de página al 100% cuando se imprime.
Configuración:
RC TX: Futaba 7C FASST 2,4 GHz
RX RC: ASSAN 6CH
cámara: 1/3 "Sony CCD cámara ( más info )
Vídeo TX: 1,3 GHz 300 mW, 1/4 Lambda antena
vídeo RX: 1,3 GHz de doble salida
de vídeo RX antena: Stock látigo
OSD: Flytron SimpleOSD XL + GPS
unidad de captura de vídeo: Sandisk V-Mate
Tricopter V1.5
Desde los Trunigy 302 giroscopios no funciona bien con mi receptor Futaba FASST decidí probar con 4 HK401B HobbyKing giroscopios lugar. Me di cuenta de lo viejo que tenía 401 gyro que el interior PCB del caso no estaba asegurada propiamente antes de montar los cuatro giroscopios nuevos que los llevó aparte y les aseguró un better.Here poco es la forma de hacerlo;
Desenrosque los 4 tornillos inferiores y saque el PCB.
Si quieres ser absoluto seguro de que los cables no están estresados y se rompen en un accidente, use un poco de pegamento caliente para asegurar a la PCB.
Para asegurar el PCB dentro de la caja utilizar una pequeña gota de pegamento caliente en cada esquina de la caja y mientras todavía caliente el lugar de PCB en la caja y empuje hacia abajo hasta que esté fijado.
Para hacer absoluto seguro de que el PCB se mantendrá fija usé un pedazo de espuma entre la tapa y el PCB. Ahora atornille el caso juntos y ya está.
Dado que los gyros HK401 tiene una huella más grande que necesitaba un marco un poco más grande. Pero en lugar de hacer uno totalmente nuevo que simplemente cometió un plato modificado superior.
Futaba FASST receptor montado.
¡Ya está!
Una cosa que noté de inmediato con los giroscopios nuevos es que no se arme el de ESC. Esto es porque ellos no dan una señal válida durante la puesta en marcha de inicialización, esto hace que el ECS de pensar que tiene un receptor de FM sin una señal válida y el del CES entra en modo de protección. Lo que quiere decir que no se inicializa hasta que se reinicia y conseguir una señal válida. Pero si tuviera que reiniciar el ESC son los giroscopios se reiniciará y ya que estoy utilizando el construido en el BEC del ESC y fueron de nuevo al cuadrado uno nuevo. Para resolver este problema, he hecho un BEC externo a "reactivar" el receptor y giroscopios;
Cuando conecto el BEC externo (con un diodo en serie con la salida posesivo, sólo para estar seguro) en un canal libre en el receptor y conéctelo al conector del saldo de la batería, el BEC sólo se enciende el receptor y gyros . Después de que los giros han inicializado enchufo en el conector de la batería principal, encendiendo la del ESC. Ahora el del CES conseguir una señal válida y arranca muy bien. Luego retire el BEC externo que utiliza para "Jump Start" y ahora puedo disfrutar de mi vuelo.
Es hora de volar!
Vuela!
Comparando el viejo Turnigy 302 giroscopios al nuevo HK401B , el de HK401B son mucho más sensibles a las vibraciones. Pero una vez que deshacerse de las vibraciones de la HK401B realizar un poco mejor que la 302. Se siente más encerrado y aún más estable. El HK401B También se trabaja en el modo digital, a diferencia de la de 302 que hizo que el tirón tricopter horrible en pleno vuelo en momentos aleatorios. Pero la mejor parte es que trabajan muy bien con mi receptor FASST. Estoy contento de haber probado el de HK401B.
En primer lugar FPV HD de vídeo de la HD GoPro héroe ;
Configuración:
RC TX: Futaba 7C FASST 2,4 GHz
RX RC: R606FS
Cámara: GoPro HD Héroe fijado en 720 60FPS
Vídeo TX: 1,3 GHz 300 mW, 1/4 Lambda antena
RX Vídeo: 1.3GHz con filtro SAW modificado
vídeo RX antena: whip Stock
Porque tú lo pediste, aquí está la plantilla en PDF de las placas centrales: http://rcexplorer.se/wp-content/uploads/2012/09/TricoptertemplateV15.pdf Asegúrese de ajustar la escala de página al 100% cuando se imprime.
¿Quieres crear tu propio Tricopter pero no sé cómo lo configuro?
Tricopter V1 y V1.5 guía de configuración
Miércoles, 10 de marzo 2010 Publicado por RCExplorer - David
Mucha gente me ha pedido que haga una guía sobre cómo todo está conectado y la configuración, así que aquí está. El tricopter se controla de la misma manera exacta como plato cíclico CCPM 120 º en un helicóptero normal. Lo que quiere decir que cuando quiera que el tricopter para seguir adelante (ascensor) los motores de dos frentes se ralentiza y las velocidades de espalda una para arriba, cuando usted quiere que vaya a la derecha (alerones) las velocidades del motor izquierdo hacia arriba y la derecha se ralentiza y viceversa. Esto significa que conecte los tres speedcontollers al igual que lo haría con los tres servos del plato cíclico en un 120 °. En mi configuración Futaba significa que dejó motor canal 1, canal 2, motor trasero y el canal derecho del motor 6 (mirando el tricopter de la espalda, la cola hacia arriba).
Si se va a tratar de volar un tricoper sin giroscopios que probablemente se bloqueaba inmediatamente. Esto es porque cada motor tiene kV poco diferente y el del CES no se corresponden perfectamente. Esto significa que cada motor reacciona de manera diferente a la del acelerador de entrada y no girar a la misma RPM. Incluso si tienes que recortar a la perfección, una tricoper no es un avión de auto estabilización. No quiero quedarme agradable y nivel. Quiere que deje de funcionar. Sería un buen puñado simplemente para mantenerlo en un vuelo estacionario, sobre todo si había una brisa exterior. Esta es la razón por un giroscopio en cada motor se utiliza, para que sea estable y fácil de volar.
Un giroscopio se hace para contrarrestar cualquier aceleración en el eje que el sensor está midiendo. Así que si una fuerza (como el viento) trata de inclinar el brazo izquierdo hacia arriba de los tricopter, el giroscopio en el brazo hace que el motor disminuya su velocidad suficiente para evitar que el brazo de la aceleración hacia arriba. Cada uno de los giroscopios no tienen idea de los giroscopios otros en el tricopter y sólo mantener rumbo de su propio motor. Esta es la razón por los giroscopios necesita ser montado en el mismo ángulo que los brazos que sujeta el motor, por lo que compensar en el eje derecho.
Los giroscopios que controlan los motores deben estar en modo de índice. Si la partida se utiliza el modo de espera de los giroscopios a tratar de luchar contra cada otro final, inevitable en un accidente. La forma más sencilla de saber si un gyro es en la partida espera o modo de velocidad es conectar un servo y ver si se arrastra en cualquier dirección. Otra prueba consiste en mover el giroscopio para ver si el servo se mueve a su posición máxima y si se vuelve a la posición neutra o no cuando se deja de mover el giroscopio. Si está en el modo de velocidad del servo sólo se mueve cuando se mueve el giróscopo y vuelve al centro cuando se deja de mover el giroscopio, por lo que si se mueve o no vuelve a la posición neutra debe cambiar el modo (que se realiza invirtiendo la ganancia) .
La cola (guiñada) de la tricopter es controlado por la inclinación del motor de nuevo a la izquierda o la derecha.
Esto se hace por un servo como en un helicóptero normal, y como en un helicóptero normal de un giroscopio se utiliza en este eje también. Esto hace un total de giroscopios en un tricopter a cuatro. Este giro puede utilizarse en cualquier tipo de título o modo de espera, dependiendo de lo que prefieras. (Si usted no sabe cuál prefiere, le recomiendo usar la partida espera.) Gracias a los otros tres giroscopios, el tricopter queda perfectamente nivelado cuando el rotor de cola se inclina y el tricopter gira alrededor de su propio eje.
Conexión de todo hasta
Este es un diagrama que muestra cómo todo está conectado en un tricopter (clic para ampliar la imagen): Los tres giroscopios principales están conectados en serie con los CES y los tres alambres giroscópicos de ganancia están conectados entre sí en paralelo en el mismo canal, en mi caso, el canal 3. Esto significa que los tres giroscopios principales tienen la misma sensibilidad del giróscopo. El servo de cola está conectado en serie con el giro de cola y el alambre de ganancia está conectado al canal 5, que es el canal de ganancia del giróscopo en mi sistema Futaba. De esta manera puedo cambiar tanto la ganancia en el giro de cola y los tres giróscopos principales por separado directamente en el transmisor.
Configuración del transmisor
Observe! En el ejemplo siguiente, se necesitan tres servos de su elección (lo que sea que haya por ahí). Estos servos no se necesitan más una vez que la configuración se hace.
Ahora es el momento de programar su radio. Yo uso un Futaba 7C así que eso es lo que voy a utilizar como referencia. Inicio de conmutando al modo helicóptero y definir el ajuste del plato cíclico a 120 º CCPM (HR3). Antes de comenzar, usted debe probar un regulador de velocidad conectado al canal 3, para asegurarse de que tiene las posiciones del acelerador de la manera correcta y no invierte. A continuación, conectar un servo y ver a qué extremo se va. Esto es para que sepas en qué dirección se mueve el servo del acelerador cuando más se aplica. Ahora usted puede utilizar tres servos en lugar de los reguladores de velocidad para arreglar las cosas, ya que es mucho más fácil ver exactamente lo que está sucediendo y mucho menos riesgo de hacerse daño. Conecte los tres servos para canalizar 1,2 y 6 sin los giroscopios. En este momento lo único que quiero saber es que la configuración de swash son correctos, no hay necesidad de agregar variables a liar las cosas. Vaya al menú swash y cambiar la configuración a Aileron +40, +40 y Elevador Pitch +100.
Mueva hacia arriba la palanca del gas, los tres servos deben estar moviéndose hacia arriba. Si no es así, vaya al menú de marcha atrás y revertir el canal que se está moviendo por el camino equivocado. Inténtelo de nuevo. Cuando todos los servos se mueven hacia arriba cuando usted aumenta su acelerador puede continuar con el siguiente paso. Si todos los servos se mueven en sentido contrario cambiar el ajuste de tono en el menú swash a -100 en lugar de 100.
Mueva el stick de gas en torno a la mitad y manténgalo así. A continuación, mueva el stick del alerón (stick izquierdo) hacia la derecha, el servo conectado al canal 6 debe moverse hacia abajo, lo que indica menos del acelerador, y el servo conectado al canal 1 debe moverse hacia arriba, lo que indica mayor acelerador. Si se invierte entrar en el menú swash y cambiar la configuración de alerones a -40 en lugar de 40. Inténtelo de nuevo. Hay que mover la forma en estos momentos. El servo conectado al canal 2 no debe moverse en absoluto.
Mueva el stick (palo izquierdo) hacia adelante, el servo conectado al canal 2 debe moverse hacia arriba (más gas) y los servos del canal 1 y 6 deberían moverse hacia abajo (menos del acelerador). Si se invierte cambiar la configuración Ascensor a -40 en lugar de 40.
Estos son los valores que terminé con:
No servos invertidos
Swash Ail +40, -40 ELE, PIT 100
Es hora de crear los tres giróscopos principales. Conectar el ellos en serie con los servos y conecte los tres cables giroscópicos de ganancia para el canal 3. Esto hará las cosas mucho más fácil si usted tiene los giroscopios colocados en el marco de esta etapa. Establezca su curva de gas a 0% y mover un giroscopio para comprobar si está en rumbo modo de retención. Si está en modo de retención título, ajuste la curva del motor a 100%, en lugar de cambiar al modo de los giroscopios tasa de cambio. Ahora toque el bastidor en la misma dirección que uno de los brazos y mantener un ojo en el servo conectado a ese brazo. Cuando se incline hacia abajo el brazo del servo debe moverse hacia arriba (más del acelerador) para compensar. Si no es necesario cambiar el interruptor DIP poco en el llamado giro dirección servo, revocada, o algo similar. Intente de nuevo para asegurarse de que se mueve en la dirección correcta. Repetir esto con los otros dos brazos.
Verifique que el servo de cola se mueve de la manera correcta cuando se mueve la palanca del timón. Si no invierte canal 4 en el radio. Ajuste la ganancia del gyro (canal 5) al 0% y comprobar si el giro es en la partida modo espera, si no se establece la ganancia del 100% en su lugar. Compruebe que el giróscopo compensa en la dirección correcta moviendo la cola en una dirección, el servo debe dar tirar en la dirección opuesta. Si no puede revertir el cambio de dirección en el giroscopio.
Estamos casi listos ahora. Establecer todo el punto de la curva de gas y el 30% (70% si tiene que invertir el canal 3 para obtener los giroscopios en el modo de cambio). Este es un buen punto de partida para su primer salto con el tricopter.
Haga el ajuste de giro en la cola y el 20% (o el 80% si se invierte el canal 5 para entrar en modo Heading hold).
Completa tu formación y conectar todo de acuerdo con el diagrama anterior. Asegúrese de comprobar bien todo. Cada vez que inicie el tricopter hay que recalibrar los puntos finales del acelerador en los controladores de velocidad. Esto es para asegurarse de que todos tienen los mismos extremos exactas. Así que para poner en marcha su poder tricopter primero el transmisor y restablecer todos los ajustes, a continuación, mueva la palanca del acelerador a la posición máxima (velocidad máxima). Conecte la batería en el tricopter y esperar a que los giroscopios para inicializar. Espere a que los CES a sonar su señal sonora para la entrada de calibración del acelerador y luego mueva la palanca del acelerador a la posición hacia abajo. Los CES debe jugar una melodía que indica que están listos.
Es hora de probar mosca!
Encuentre un espacio abierto muy grande sin viento. El primer vuelo se dedicará a establecer la ganancia del giróscopo. Toma de arriba y conseguir que el efecto suelo (0,5 metros o menos). Si no se tambalee o oscilar, aterrizar y aumentar la ganancia de los giróscopos principales por 2% (por ejemplo al 28% si tiene que 30% antes). Inténtelo de nuevo y repita hasta que usted comienza a conseguir una oscilación débil (los giroscopios exceso de compensación), es la tierra y disminuir la ganancia de un 1% y su hecho! Ahora es lo más estable posible. Haga lo mismo con el giro de cola, pero no se sorprenda si se llega a un 100% sin oscilación.
Mis ajustes de ganancia de corriente: Curva del acelerador 14,5% (giróscopos principales), aumento de Gyro 11% (cola).
Si usted siente que el tricopter es demasiado sensible a mediados de palo se puede añadir un poco de exposición, baje las tasas o bajar el alerón y elevador configuración swash. Me gusta mi tricopter con ajustes de 40% de los alerones y el elevador sin expo y del 100% en todas las tarifas, pero a cada uno lo suyo.
Buena suerte y volar seguro.

