coronado33
Usuario (México)
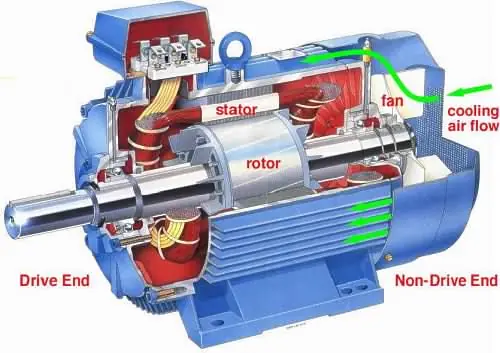
Motor de Inducción Se puede ilustrar el principio del motor de inducción se realiza de la siguiente forma: Se suspende un imán permanente de un hilo sobre una tornamesa de cobre o aluminio que gira en un cojinete colocado en una placa fija de hierro. El campo del imán permanente se completa así a través de la placa de hierro. El pivote debería estar relativamente sin fricción y el imán permanente debe tener la suficiente densidad de flujo. Cuando gira el imán en el hilo, se observará que el disco que está debajo gira con él, independientemente de la dirección de giro del imán. El disco sigue el movimiento del imán, como se muestra en la figura debido a las corrientes parásitas inducidas que se producen por el movimiento relativo de un conductor (el disco) y el campo magnético. Por la ley de Lenz, la dirección del voltaje inducido y de las corrientes parásitas consecuentes produce un campo magnético que tiende a oponerse a la fuerza o movimiento que produjo el voltaje inducido. Las corrientes parásitas que se producen tienden a producir a su vez un polo S unitario en el disco en un punto bajo el polo N giratorio del imán y un polo N unitario en el disco bajo el polo S giratorio del imán. Por lo tanto, siempre que el imán continúe moviéndose, continuará produciendo corrientes parásitas y polos de signo contrario en el disco que está abajo. El disco, por lo tanto, gira en la misma dirección que el imán. pero debe girar a velocidad menor que la del imán. Si el disco girara a la misma velocidad que la del imán, no habría movimiento relativo entre el conductor y el campo magnético y no se producirían corrientes parásitas en el disco. Característica de Funcionamiento del Motor de Inducción El funcionamiento de un motor, en general, se basa en las propiedades electromagnéticas de la corriente eléctrica y la posibilidad de crear ,a partir de ellas, unas determinadas fuerzas de atracción y repulsión encargadas de actuar sobre un eje y generar un movimiento de rotación. Suponiendo que un motor de inducción comercial de jaula de ardilla se haga arrancar con el voltaje nominal en las terminales de línea de su estator (arranque a través de la línea) desarrollará un par de arranque de acuerdo que hará que aumente su velocidad. Al aumentar su velocidad a partir del reposo (100 por ciento de deslizamiento), disminuye su deslizamiento y su par disminuye hasta el valor en el que se desarrolle el par máximo . Esto hace que la velocidad aumente todavía más, reduciéndose en forma simultánea el deslizamiento y el par que desarrolla el motor de inducción. Los pares desarrollados al arranque y al valor del deslizamiento que produce el par máximo ambos exceden (en el caso normal) al par aplicado a la carga. Por lo tanto la velocidad del motor aumentará, hasta que el valor del deslizamiento sea tan pequeño que el par que se desarrolla se reduzca a un valor igual al par aplicado por la carga. El motor continuará trabajando a esta velocidad y valor de equilibrio del desliza-miento hasta que aumente o disminuya el par aplicado. Se muestra la relación entre los pares de arranque, máximo y nominal a plena carga que desarrolla un motor de inducción, como función de la velocidad de éste y del deslizamiento. Esta figura es presentación gráfica de la corriente y el par desarrollados en el rotor del motor como funciones del deslizamiento desde el instante del arranque (punto a) hasta la condición de funcionamiento en estado estable (en general entre marcha en vacío y marcha a plena carga - puntos c y d) cuando los pares desarrollado y aplicado son iguales. Curva Característica Circuito Equivalente de un motor de Inducción por fase Clasificación de los Motores Asincrónicos Según el diseño de la jaula,( Nema) Motor de diseño NEMA A Torque alto, deslizamiento nominal bajo y corriente de arranque alta. Es un motor de inducción con rotor tipo jaula de ardilla, diseñado con características de torque y corriente de arranque que exceden los valores correspondientes al diseño NEMA B, son usados para aplicaciones especiales donde se requiere un torque máximo mayor que el normal, para satisfacer los requerimientos de sobrecargas de corta duración. Estos motores también son aplicados a cargas que requieren deslizamientos nominales muy bajos y del orden del 1% o menos (velocidades casi constantes). Motor de diseño NEMA B Torque normal, corriente de arranque normal y deslizamiento nominal normal. Son motores con rotor tipo jaula de ardilla diseñados con características de torque y corriente de arranque normales, así como un bajo deslizamiento de carga de aproximadamente 4% como máximo. En general es el motor típico dentro del rango de 1 a 125 HP. El deslizamiento a plena carga es de aproximadamente 3%. Este tipo de motor proporcionará un arranque y una aceleración suave para la mayoría de las cargas y también puede resistir temporalmente picos elevados de carga sin detenerse. Motor de diseño NEMA C Torque alto, deslizamiento nominal normal, corriente de arranque normal. Son motores de inducción con rotor de doble jaula de ardilla, que desarrollan un alto torque de arranque y por ello son utilizados para cargas de arranque pesado. Estos motores tienen un deslizamiento nominal menor que el 5%. Motor de diseño NEMA D Torque alto, alto deslizamiento nominal, baja corriente de arranque. Este motor combina un alto torque de arranque con un alto deslizamiento nominal. Generalmente se presentan dos tipos de diseño, uno con deslizamiento nominal de 5 a 8% y otro con deslizamiento nominal de 8 a 13%. Cuando el deslizamiento nominal puede ser mayor del 13%, se les denomina motores de alto deslizamiento o muy alto deslizamiento (ULTRA HIGH SLIP). El torque de arranque es generalmente de 2 a 3 veces el par nominal aunque para aplicaciones especiales puede ser más alto. Estos motores son recomendados para cargas cíclicas y para cargas de corta duración con frecuentes arranques y paradas. Motores de diseño NEMA F Torque de arranque bajo, corriente de arranque baja, bajo deslizamiento nominal. Son motores poco usados, destinándose a cargas con frecuentes arranques. Pueden ser de altos torques y se utiliza en casos en los que es importante limitar la corriente de arranque. Dibujo de un motor de Inducción Un motor de inducción se comporta como un transformador Devanado primario = estator Devanado secundario = rotor La corriente del devanado primario(estator) crea un campo magnético giratorio, el cual induce una corriente en el devanado secundario(rotor). La corriente del rotor junto con el campo magnético inducido provocan una fuerza, que es la causa de la rotación del motor. Debido a que la transformación de potencia entre rotor y estator depende de la variación del flujo, si la velocidad del rotor aumenta, menos cantidad de potencia se puede convertir y además se van solapando la velocidad del rotor con la del campo magnético giratorio, 50 o 60 Hz .Esto significa que a la velocidad de sincronismo no existe conversión de potencia y el motor se para. La diferencia entre la velocidad de sincronismo y la velocidad real se la denomina deslizamiento. La velocidad del motor viene determinada por la frecuencia y el deslizamiento. Motor de corriente Continua Todos los motores eléctricos tienen básicamente los mismos componentes. Todos tienen un magneto estacionario denominado el estator y un electroimán denominado la armadura. El estator genera el campo magnético. Cuando una corriente eléctrica se hace pasa por el embobinado de la armadura que se ha colocado en el campo magnético generado por el estator, esta comienza a rotar debido al torque magnético. De esta manera al energía eléctrica se convierte en energía mecánica . Si el eje del motor se conecta mediante una correa a una polea esta se pone en movimiento. Un motor de CC esta compuesto por un imán fijo que constituye el inductor y un bobinado denominado inducido que es capaz de girar en el interior del primero, cuando recibe una CC. Suponiendo un motor elemental según se representa, si sobre la bobina se hace pasar una corriente se creara en la misma en un campo magnético que la hará girar al crearse una fuerza de atracción y repulsión con respecto al imán del estator. Durante este giro se produce una serie de efectos que condicionan la construcción del motor, el primero de ellos se produce cuando se enfrentan dos polos de distinto signo, momento en que la atracción será máxima y la bobina tiende a detenerse, sin embargo, por inercia pasará de largo pero el sentido de giro se invertirá y se volverá hacia atrás deteniéndose al cabo de unas cuantas oscilaciones. Ahora bien, si en el momento en que los polos opuestos se enfrentan, se invierte el sentido de la circulación de la corriente de la bobina, automáticamente se producirá un cambio de signo en los polos magnéticos creados por la misma, dando origen a que aparezcan unas fuerzas de repulsión entre ellos que obligará a aquella a seguir girando otra media vuelta, debiéndose invertir la corriente nuevamente y así sucesivamente. El método empleado para producir estos cambios es el de dividir el anillo colector por el que recibe la bobina la corriente de alimentación, en dos mitades iguales separadas por un material aislante, que giran deslizándose sobre dos contactos eléctricos fijos o escobillas uno conectado al polo positivo y el otro al negativo. De esta forma dichos contactos cruzaran dos veces por cada rotación la división entre los semianillos, inviertendose así el sentido de circulación de la corriente de la bobina. En los motores de CC es necesario aplicar al inducido una CC para obtener movimiento, así como al inductor en el caso de que éste sea del tipo de electroimán, conociéndose a esta última con la denominación de corriente de excitación. Su construcción suele estar realizada mediante un inductor cilíndrico hueco (imán o electroimán) que contiene un cierto número de pares de polos magnéticos (Norte-Sur), que se conoce con el nombre de Estator. En su interior se encuentra el inducido o rotor también cilíndrico sobre el cual se encuentra el arrollamiento. El eje está acoplado mediante rodamiento o cojinetes para permitir el giro y dispone de una superficie de contacto montada sobre un dispositivo llamado colector sobre el que se deslizan los contactos externos o escobillas. Clasificación Motores de Corriente Continua INVERSIÓN DEL SENTIDO DE GIRO EN MOTORES DE CC. Para invertir el sentido de giro de un motor de cc., basta con invertir la polaridad de la tensión aplicada en sus Bornes VB (con lo cual varía el sentido de la corriente que circula por su bobinado), y hacer así que el par de fuerzas que originan el giro del motor sea de sentido contrario. Otro método de invertir el sentido de giro es el de invertir la polaridad del campo magnético producido por las bobinas excitadoras, esto solo puede hacerse en máquinas que las tengan accesibles desde el exterior. Componentes motor cc. Los motores de corriente continua están fabricados para las tensiones normales de línea de 6, 9, 12, 24, 32, 110, 220 y 550. Las velocidades normales a plena carga son:850, 1140, 1725 y 3500 r.p.m. Componentes Imanes, escobillas que van encima del conmutador, hilo de cobre, láminas superpuestas donde va enrollado el hilo, conmutador, eje de metal donde se coloca la bobina de hilo de cobre, carcasa donde se introducen todos los componentes. Descripción El imán del motor tiene forma de media luna, hay dos imanes uno en cada lado. Las escobillas están colocadas en la base del motor y son de una mezcla de grafito y cobre, hay dos una de cada polo. Allí es donde hay que conectar la pila. El hilo de cobre va enrollado sobre unas laminas superpuestas en forma de circulo dividido en tres partes. Todo ello forma el rotor. Eje de metal de diferentes medidas dependiendo del motor. La carcasa tiene forma de cilindro. Esquema de bloques de un motor dc. MOTORES DE INDUCCION En él, introduciremos una referencia que será el número de vueltas que queremos que de nuestro motor, y lo controlaremos mediante un PI, el cual da más o menos tensión al motor en función de las necesidades. Otro diagrama en bloques Conclusiones Los motores de inducción son empleados en las grandes potencias. Son motores industriales que necesitan una gran cantidad de corriente para el arranque. Los motores de inducción llevan circuitos integrados para regular la toma de corriente de la línea y así no generar bajones de intensidad de la corriente. Los motores de inducción son mas caros que los de continua, pero la reparación de un motor de inducción es mucho mas fácil que la del motor de corriente continua. El voltaje boots es muy importante en un motor de inducción. Por lo general los motores de continua se emplean para trabajos pesados y mas lentos que el motor de inducción. TEMA: MOTORES INDUCCIÓN Motores a Inducción Las barras del rotor pueden ser fabricadas de varilla de cobre gruesa y soldadas a las extre-midades. En pequeños motores pueden ser de aluminio colado, con los anillos colados en su lugar. La diferencia entre el motor a inducción y el motor síncrono es que en el motor a inducción el rotor no es un imán permanente sino que es un electroimán. Tiene barras de conducción en todo su largo, incrustadas en ranuras a distancias uniformes alrededor de la perifería. Las barras están conectadas con anillos(en cortocircuito como dicen los electricistas) a cada extremidad del rotor. Estan soldadas a las extremidades de las barras. Este ensamblado se parece a las pequeñas jaulas rotativas para ejercer a mascotas como hamsters y por eso a veces se llama "jaula de ardillas", y los motores de inducción se llaman motores de jaula de ardilla. Cada par de barras es una revolución en cortocircuito, hablando magnéticamenteEl rotor se magnetiza por las corrientes inducidas en sus barras, debido a la acción del campo magnético, girando en el estator. Mientras que el campo del estator pasa a lo largo de las barras del rotor, el campo magnético que cambia induce altas corrientes en ellas y genera su propio campo magnético. La polaridad del campo magnético inducido del rotor es tal que repela al campo del estatorque lo creó, y esta repulsión resulta en un torque sobre el rotor que le causa de girar. Motor de Inducción CA Ya que el motor de inducción funciona por repulsión magnética, en lugar de por atracción como el motor sincrono, ha sido llamado "un motor a inducción repulsiva". Si no hubiera fricción en el sistema, el rotor giraría a una velocidad síncrona, pero no produciría un torque útil. Bajo esta condición no hubiera movimiento relativo entre las barras del rotor y el campo rotativo del estator, y no hubiera inducción de corriente en ellas. En el momento en que se aplica una carga al motor, la velocidad se reduce, lo que provoca que las barras del rotor corten la líneas magnéticas de fuerza del campo del estator y crean la fuerza de repulsión en el rotor. El campo magnético inducido en el rotor se mueve en la dirección opuesta a la rotación y la velocidad de este movimiento dependen de la carga aplicada . Esto quiere decir que las RPM siempre serán inferiores a la velocidad síncrona. La diferencia entre la velocidad actual y la velocidad síncrona se llama el deslizamiento. Entre más grande es el deslizamiento, más grande es la corriente inducida en las barras del rotor, y más grande el torque. La corriente en los enrolladas del estator también se incrementa para crear las corrientes más largas en las barras. Por estas razones la velocidad de un motor de inducción siempre dependerá conclucion; como motor de induccion Se puede ilustrar el principio del motor de inducción se realiza de la siguiente forma: Se suspende un imán permanente de un hilo sobre una tornamesa de cobre o aluminio que gira en un cojinete colocado en una placa fija de hierro. El campo del imán permanente se completa así a través de la placa de hierro. El pivote debería estar relativamente sin fricción y el imán permanente debe tener la suficiente densidad de flujo. Cuando gira el imán en el hilo, se observará que el disco que está debajo gira con él, independientemente de la dirección de giro del imán.
Un rodamiento, también denominado rulemán, rúleman, rolinera, cojinete, balinera o balero (en México y Venezuela) o rodaje (en Perú) o caja de bolas (en Cuba, Republica Dominicana y Puerto Rico) o rol en Costa Rica o también bolillero en Argentina, es un elemento mecánico que reduce la fricción entre un eje y las piezas conectadas a éste, que le sirve de apoyo y facilita su desplazamiento. Tipos de rodamientosCada clase de rodamientos muestra propiedades características, que dependen de su diseño y que lo hace más o menos apropiado para una aplicación dada. Por ejemplo, los rodamientos rígidos de bolas pueden soportar cargas radiales moderadas así como cargas axiales pequeñas. Tienen baja fricción y pueden ser producidos con gran precisión. Por lo tanto, son preferidos para motores eléctricos de medio y pequeño tamaño. Los rodamientos de rodillos esféricos pueden soportar cargas radiales muy pesadas y son oscilantes, lo que les permite asumir flexiones del eje, Θentre dos rodamientos, que soportan un mismo eje. Estas propiedades los hacen muy populares para aplicaciones por ejemplo en ingeniería pesada, donde las cargas son fuertes, así como las deformaciones producidas por las cargas, en máquinas grandes es también habitual cierta desalineación entre apoyos de los rodamientos. Rodamientos rígidos de bolas Rodamientos rígidos de bolas.Son usados en una gran variedad de aplicaciones. Son fáciles de diseñar, no separables, capaces de operar en altas e incluso muy altas velocidades y requieren poca atención o mantenimiento en servicio. Estas características, unidas a su ventaja de precio, hacen a estos rodamientos los más populares de todos los rodamientos. Rodamientos de una hilera de bolas con contacto angularEl rodamiento de una hilera de bolas con contacto angular tiene dispuestos sus caminos de rodadura de forma que la presión ejercida por las bolas es aplicada oblicuamente con respecto al eje. Como consecuencia de esta disposición, el rodamiento es especialmente apropiado para soportar no solamente cargas radiales, sino también grandes cargas axiales, debiendo montarse el mismo en contraposición con otro rodamiento que pueda recibir carga axial en sentido contrario. Rodamientos de agujasSon rodamientos con rodillos cilíndricos muy delgados y largos en relación con su menor diámetro. A pesar de su pequeña sección, estos rodamientos tienen una gran capacidad de carga y son eminentemente apropiados para las aplicaciones donde el espacio radial es limitado. Rodamientos de rodillos cónicosEl rodamiento de rodillos cónicos, debido a la posición oblicua de los rodillos y caminos de rodadura, es especialmente adecuado para resistir cargas radiales y axiales simultáneas. Para casos en que la carga axial es muy importante hay una serie de rodamientos cuyo ángulo es muy abierto. Este rodamiento debe montarse en oposición con otro rodamiento capaz de soportar los esfuerzos axiales en sentido contrario. El rodamiento es desmontable; el aro interior con sus rodillos y el aro exterior se montan cada uno separadamente. Rodamientos de rodillos cilíndricos de empujeSon apropiados para aplicaciones que deben soportar pesadas cargas axiales. Además, son insensibles a los choques, son fuertes y requieren poco espacio axial. Son rodamientos de una sola dirección y solamente pueden aceptar cargas axiales en una dirección. Su uso principal es en aplicaciones donde la capacidad de carga de los rodamientos de bolas de empuje es inadecuada. Tienen diversos usos industriales, y su extracción es segura. Rodamientos axiales de rodillos a rótula Rodamiento axial.El rodamiento axial de rodillos a rótula tiene una hilera de rodillos situados oblicuamente, los cuales, guiados por una pestaña del aro fijo al eje, giran sobre la superficie esférica del aro apoyado en el soporte. En consecuencia, el rodamiento posee una gran capacidad de carga y es de alineación automática. Debido a la especial ejecución de la superficie de apoyo de los rodillos en la pestaña de guía, los rodillos giran separados de la pestaña por una fina capa de aceite. El rodamiento puede, por lo mismo, girar a una gran velocidad, aun soportando elevada carga. Contrariamente a los otros rodamientos axiales, éste puede resistir también cargas radiales. Rodamientos de bolas a rótula Rodamiento de bolas a rótula.Los rodamientos de bolas a rótula tienen dos hileras de bolas que apoyan sobre un camino de rodadura esférico en el aro exterior, permitiendo desalineaciones angulares del eje respecto al soporte. Son utilizados en aplicaciones donde pueden producirse desalineaciones considerables, por ejemplo, por efecto de las dilataciones, de flexiones en el eje o por el modo de construcción. De esta forma, liberan dos grados de libertad correspondientes al giro del aro interior respecto a los dos ejes geométricos perpendiculares al eje del aro exterior. Este tipo de rodamientos tienen menor fricción que otros tipos de rodamientos, por lo que se calientan menos en las mismas condiciones de carga y velocidad, siendo aptos para mayores velocidades. Rodamientos de rodillos cilíndricos Rodamiento de rodillos cilíndricos del tipo NUP.Un rodamiento de rodillos cilíndricos normalmente tiene una hilera de rodillos. Estos rodillos son guiados por pestañas de uno de los aros, mientras que el otro aro puede tener pestañas o no. Según sea la disposición de las pestañas, hay varios tipos de rodamientos de rodillos cilíndricos: Tipo NU: con dos pestañas en el aro exterior y sin pestañas en el aro interior. Sólo admiten cargas radiales, son desmontables y permiten desplazamientos axiales relativos del alojamiento y eje en ambos sentidos. Tipo N: con dos pestañas en el aro interior y sin pestañas en el aro exterior. Sus características similares al anterior tipo. Tipo NJ: con dos pestañas en el aro exterior y una pestaña en el aro interior. Puede utilizarse para la fijación axial del eje en un sentido. Tipo NUP: con dos pestañas integrales en el aro exterior y con una pestaña integral y dos pestañas en el aro interior. Una de las pestañas del aro interior no es integral, es decir, es similar a una arandela para permitir el montaje y el desmontaje. Se utilizan para fijar axialmente un eje en ambos sentidos. Los rodamientos de rodillos son más rígidos que los de bolas y se utilizan para cargas pesadas y ejes de gran diámetro. carlos rodriguez Rodamientos de rodillos a rótulaEl rodamiento de rodillos a rótula tiene dos hileras de rodillos con camino esférico común en el aro exterior siendo, por lo tanto, de alineación automática. El número y tamaño de sus rodillos le dan una capacidad de carga muy grande. La mayoría de las series puede soportar no solamente fuertes cargas radiales sino también cargas axiales considerables en ambas direcciones. Pueden ser reemplazados por cojinetes de la misma designación que se dará por medio de letras y números según corresponda a la normalización determinada. Rodamientos axiales de bolas de simple efectoEl rodamiento axial de bolas de simple efecto consta de una hilera de bolas entre dos aros, uno de los cuales, el aro fijo al eje, es de asiento plano, mientras que el otro, el aro apoyado en el soporte, puede tener asiento plano o esférico. En este último caso, el rodamiento se apoya en una contraplaca. Los rodamientos con asiento plano deberían, sin duda, preferirse para la mayoría de las aplicaciones, pero los de asiento esférico son muy útiles en ciertos casos, para compensar pequeñas inexactitudes de fabricación de los soportes. El rodamiento está destinado a resistir solamente carga axial en una dirección. Rodamientos de aguja de empujePueden soportar pesadas cargas axiales, son insensibles a las cargas de choque y proveen aplicaciones de rodamientos duras requiriendo un mínimo de espacio axial. conclucion: Los rodamientos de rodillos esféricos pueden soportar cargas radiales muy pesadas y son oscilantes, lo que les permite asumir flexiones del eje, Θentre dos rodamientos, que soportan un mismo eje. Estas propiedades los hacen muy populares para aplicaciones por ejemplo en ingeniería pesada, donde las cargas son fuertes, así como las deformaciones producidas por las cargas, en máquinas grandes es también habitual cierta desalineación entre apoyos de los rodamientos. Rodamientos rígidos de bolas Rodamientos rígidos de bolas.Son usados en una gran variedad de aplicaciones.