Xedkratos
Usuario (México)
Durante mi construcción del robot balancin me vi en muchos problemas en cuanto a la información de encoders ópticos con arduino, por eso me dispuse a hacer este post para explicar, una vez mas, muy brevemente su funcionamiento, en este caso voy a usar los siguientes materiales. - Arduino Uno. - Motor Faulhaber con reducción - Modulo driver de motores L393d - Protoboard - 2 resistencias de 1K - 4 resistencias de 10K - 2 leds - 1 resistencia de 120 ohms y otras cosas como cables y una fuente de 12v. para el motor Por supuesto tendrán que ver el vídeo para continuar link: https://www.youtube.com/watch?v=70rqTf7AsvQ Los diagramas, código y mas información la encontraran en mi blog: http://elxedelectronics.blogspot.mx/ gracias por visitar mi post
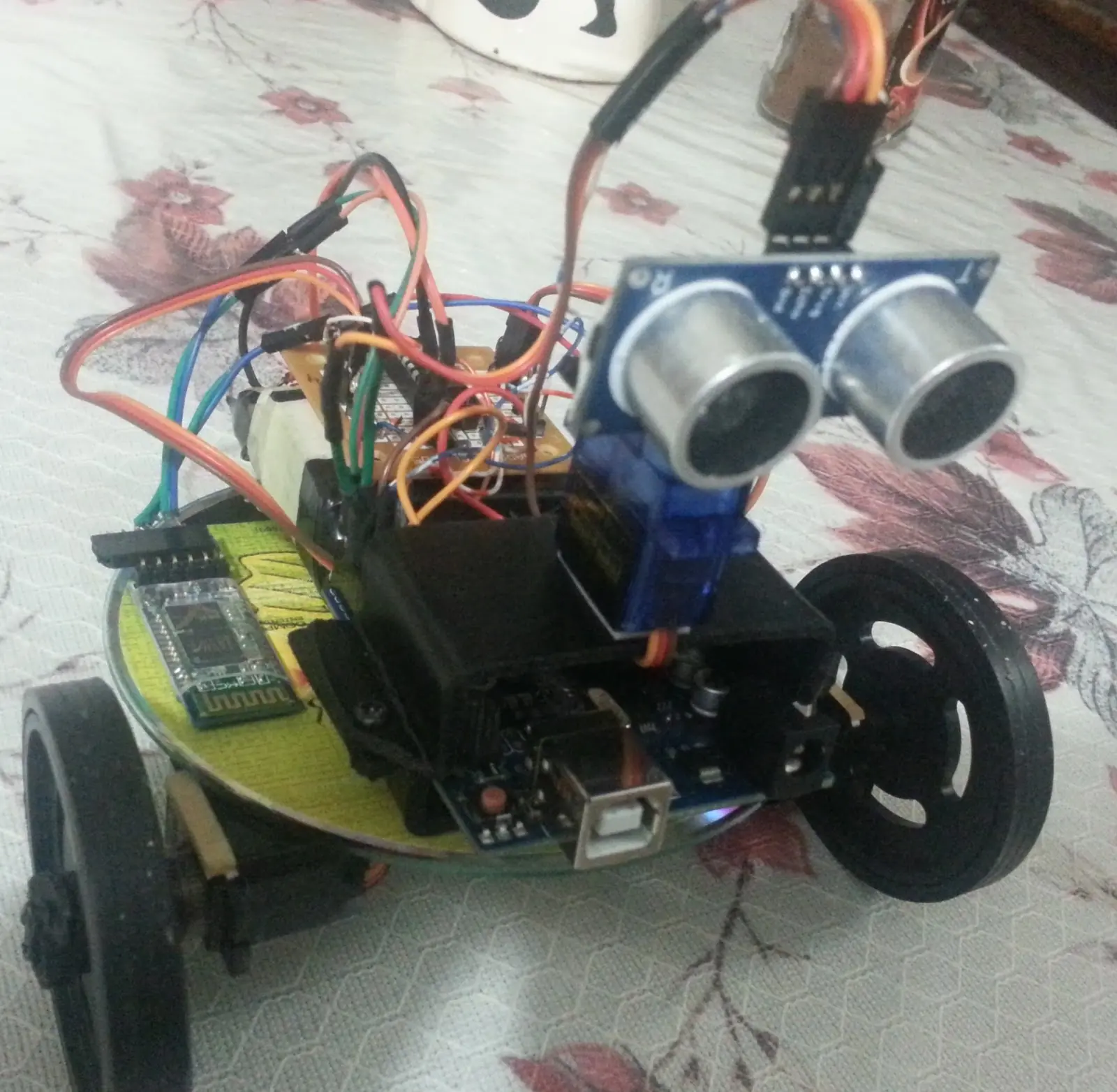
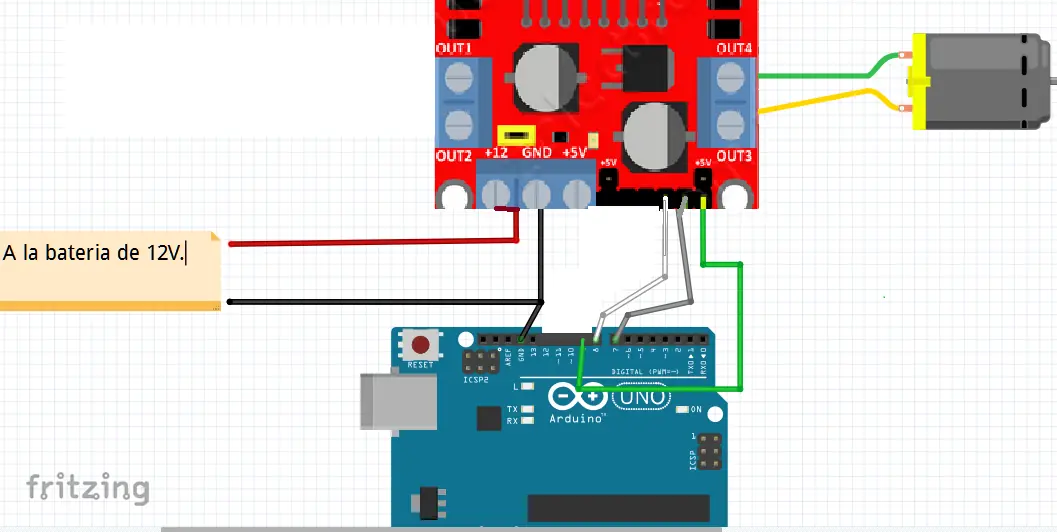
Este es un proyecto que realice hace pocos meses, después de ver varios vídeos me di cuenta que quienes van empezando en la electrónica y programación comienzan armando un pequeño vehículo que esquiva obstáculos con la ayuda de un sensor de ultrasonido, pero por que no hacerlo un poco mas interesante?, así que puse un pequeño servomotor para que los "ojos" del robot voltearan a ambos lados al momento de detectar un obstaculo y que de esa forma eligira el camino a seguir, el resultado es este: link: https://www.youtube.com/watch?v=TLuexI8R0X8 Estos son los principales materiales -Vinil espumado de 3mm. De el color que ustedes prefieran -Tornillos -Cautín y soldadura -1 servomotor pequeño, yo utilice el ya bien conocido SG90 -2 moto reductores -2 ruedas que le queden a sus motoreductores -un módulo puente H -Batería, corriente recomendada 2200 miliamperes -Silicon frío o cualquier pegamento resistente -modulo Bluetooth HC-05 Todos los esquemas, programacion y mas informacion en mi blog: http://elxedelectronics.blogspot.mx/2015/11/tutorial-robot-detector-de-obstaculos.html
La primera vez que vi un robot balancín quedé fascinado ante semejante artefacto, aquel vídeo mostraba un robot bastante estable, pero por supuesto llegaron a mi mente muchas preguntas lógicas, ¿como "sentía" su inclinación? ¿como se calculaba la fuerza con la que reaccionaban las llantas? ¿como se estabiliza ante una perturbación? y es que para nosotros el equilibrio en nuestros cuerpos es natural, ni siquiera hay que pensar en ello, pero nuestros cerebros hacen el trabajo de forma inconsciente, en el presente tutorial tratare de despejar las dudas que alguna vez me intrigaron y de paso les mostrare las técnicas que a grandes rasgos les ayudarán a montar su propio robot de este tipo, cabe aclarar que se requieren de ciertos conocimientos técnicos sobre electrónica o programación que asumiré ustedes ya conocen, de cualquier forma Internet es un lugar vasto en donde seguramente encontrarán las respuestas a las pequeñas problemáticas que podrían surgir, habiendo dicho esto, comencemos... La mecánica de un robot de este tipo es relativamente sencilla y requiere de por lo menos los siguientes componentes físicos: 1 chasis, (de cualquier material ligero) 2 motores dc con reducción (1:50 o aproximado), 1 microcontrolador(en este caso un ATMEGA328p o un Arduino UNO) 1 Giroscopio/acelerómetro (usaremos el MPU6050), 1 controlador de motores(L298n), 2 Baterías (de preferencia de litio, una de 5v y una de 12v. a por lo menos 2000ma) * y los siguientes componentes opcionales: encoders (para cada motor) 1 modulo Bluetooth HC-05 mucha paciencia y algo de tiempo libre El funcionamiento: Básicamente el robot lucha por mantenerse en vertical, cuando el sensor detecta una variación en el ángulo ideal, el cual llamaremos Setpoint, los motores reaccionan moviéndose hacia esa dirección evitando la caída (el principio básico de un péndulo invertido), para lograrlo se implementará un control PID (Proporcional Integral Derivativo) que determinara la salida PWM de los motores. Encoders Los encoders juegan un papel muy importante en cuanto la estabilización del robot y son necesarios para controlarlo vía bluetooth, aunque se puede prescindir de ellos si lo único que se busca es mantenerlo en posición vertical. Ángulos y el Filtro de Kalman. Para algunos de ustedes es bien sabido que para usar el sensor MPU6050 se requiere "procesar" la información en crudo que entrega el giroscopio y transformarla en una señal limpia y estable, lo suficientemente estable para medir 1 grado de giro con precisión, para esto vamos a implementar el Filtro de Kalman, el cual es un modelo matemático, bastante robusto que calcula en base a los datos del sensor, la velocidad angular y aceleracion con gran precisión, el filtro de Kalman es bastante complejo y no profundizaremos en ese tema durante este tutorial, pero en caso que quieran conocer más sobre este fascinante tema les recomiendo leerse estos post.(en inglés) Chasis. En internet se encuentran todo tipo de formas y tamaños de balancines, para éste en particular lo único que hay que considerar es: tener una estructura de 2 o más niveles para la electrónica, no debe ser demasiado alto lo mejor es que el diámetro de sus ruedas sea 1/3 de la altura del robot, las baterías deben quedar en la parte de abajo, el material a usarse debe ser lo más ligero y resistente posible, yo use madera y vinil, pero el diseño definitivo quedará a cargo del lector. Electrónica. Para facilitar las cosas y en vista de que todo el mundo tiene un Arduino Uno, yo decidí usar esta plataforma para desarrollar el proyecto. Mas informacion en mi blog: http://elxedelectronics.blogspot.com/

Hola, en esta ocasión les quiero compartir un vistazo a mi robot cuadrúpedo basado en la plataforma de desarrollo arduino, recuerden suscribirse y darle like si les gustaron los vídeos, pronto subiré esquemas y los diseños a mi blog http://elxedelectronics.blogspot.mx/ para que cualquiera pueda construir uno, cuando lo haga actualizare este post , gracias! link: https://www.youtube.com/watch?v=htv55NPapMY link: https://www.youtube.com/watch?v=fm2dV81OKVU