LUMAS89
Usuario (Argentina)
Temas que abarca este curso 1 personas 2 la familia 3 Conociendo otras personas 4 En la escuela 5 Países e idiomas 6 Leer y escribir 7 Los números 8 las horas 9 Los días de la semana 10 ayer - hoy - mañana 11 los meses 12 Bebidas 13 Actividades 14 Los colores 15 Frutas y alimentos 16 Las estaciones y el clima 17 En la casa 18 Limpieza domestica 19 En la cocina 20 Pequeñas conversaciones 1 21 Pequeñas conversaciones 2 22 pequeñas conversaciones 3 23 Aprendiendo lenguas extranjeras 24 Compromiso / sita 25 En la ciudad 26 En la naturaleza 27 En el Hotel - llegada 28 En el hotel quejas 29 En el restaurante 1 30 En el restaurante 2 31 En el restaurante 3 32 En el restaurante 4 33 En la estación del tren 34 En el tren 35 En el aeropuerto 36 Transporte publico 37 En el camino 38 En el taxi 39 Averías en el coche 40 Preguntando por el camino 41 Orientación 42 Una vista por la ciudad 43 En el zoológico 44 Salir por la noche 45 En el cine 46 En la discoteca 47 Preparando viaje 48 Actividades vacacionales 49 Deporte 50 En la piscina 51 haciendo diligencias 52 En los grandes almacenes 53 Tiendas 54 ir de compras 55 Trabajar 56 Sentimientos 57 En la consulta del doctor 58 Las partes del cuerpo humano 59 En la oficina de correos 60 En el banco 61 Números ordinales 62 Haciendo preguntas 1 63 Haciendo preguntas 2 64 Negación 1 65 Negación 2 66 Pronombres posesivos1 67 pronombres posesivos 2 68 Grande - Pequeño 69 necesitar - querer 70 querer algo 71 querer algo 72 deber hacer algo 73 poder hacer algo 74 pedir algo 75 dar explicaciones 1 76 dar explicaciones 2 77 dar explicaciones 3 78 Adjetivos 1 79 Adjetivos 2 80 Adjetivos 3 81 Pretérito 1 82 Pretérito 2 83 Pretérito 3 84 Pretérito 4 85 Preguntas - Pretérito 1 86 Preguntas - Pretérito 2 87 Pretérito de los verbos modales 1 88 Pretérito 2 89 Modo imperativo 1 90 Modo imperativo 2 91 Oraciones subordinarías con que 1 92 Oraciones subordinarías con que 2 93 Oraciones subordinarías con si 94 Conjunciones 1 95 Conjunciones 2 96 Conjunciones 3 97 Conjunciones 4 98 Dobles conjunciones 99 Genitivo 100 Adverbios

Algoritmo para que los robots aprendan a coger y sujetar objetos de formas complejas Para una persona es fácil escoger el mejor lugar por el que sostener un objeto, pero un robot autónomo, como los que quizá tendremos algún día ayudándonos en el hogar o en el trabajo, necesitará un nuevo tipo de programación. Un equipo de ingenieros de la Universidad de Cornell (en Ithaca, Nueva York) ha desarrollado un algoritmo que permite a un robot decidir cuáles son los mejores sitios por los que coger y sujetar un objeto que nunca ha visto. Esta habilidad se basaría en la experiencia ganada por el robot al coger otros objetos previamente, y de este modo el robot podría decidir con mejores criterios cómo coger y sujetar nuevos objetos. El trabajo desarrollado por Hod Lipson, profesor de ingeniería mecánica y ciencias de la computación de la Universidad de Cornell, y Ashutosh Saxena, profesor de ciencias de la computación en la misma universidad y especialista en aprendizaje automático, es válido para varias clases de robots, pero se ha centrado sobre todo en dotar de "inteligencia" para coger y sostener cosas a una espectacular mano robótica metamórfica. Esta mano funciona aplicando a un material formado por partículas dentro de una bolsa elástica un proceso por el que esa masa de granitos se vuelve rígida e incrementa su densidad. De esta manera, se logra que la "mano" se afiance del modo adecuado a cada objeto. Este método evita tener que recurrir a los tradicionales diseños que se limitan a imitar, con mayor o menor fidelidad, la mecánica de una mano humana. Esta mano metamórfica se amolda a los objetos y ajusta su agarre para cada uno, a diferencia de una mano convencional con la que sólo es posible encajarla del mejor modo posible que permitan sus articulaciones con el objeto a agarrar. La estructura metamórfica de la nueva mano la convierte en una especie de herramienta universal para agarrar cosas. Por tanto, es fácil pronosticar que sus aplicaciones futuras van a ser numerosísimas, incluyendo operaciones de artificieros para desactivar artefactos explosivos o para mover objetos potencialmente peligrosos, su uso en brazos robóticos de fábricas para infinidad de tareas industriales, e incluso aplicaciones que hoy pueden parecer ciencia-ficción. Dos ejemplos de éstas últimas son el uso de la mano metamórfica en los pies de un robot con el fin de capacitarle para caminar sobre las paredes, o la fabricación de extremidades protésicas multifunción. Sin embargo, para conseguir todo esto no basta con el hardware. Se necesita un software que esté a su altura. Y aquí es donde entra en escena el nuevo algoritmo. En los experimentos realizados con un brazo robótico modificado, el equipo de investigación, que incluye también a Yun Jiang y John Amend, obtuvo, en promedio, un éxito de entre el 90 y el cien por cien, dependiendo del tipo de objeto. En la mayoría de los casos, el robot era capaz de agarrar con éxito nuevos objetos que no habían formado parte del conjunto de objetos de entrenamiento. Los objetos deformables, como por ejemplo un monedero, fueron los que le resultaban más difíciles de coger al robot, el cual logró un éxito promedio de sólo el 67 por ciento. El siguiente paso en esta línea de investigación será perfeccionar el algoritmo y su integración con los robots de tipos específicos.
Robots que ordenan con más eficacia espacios de uso humano gracias a "imaginar" la presencia de gente Un equipo de investigadores en el Laboratorio de Robótica Personal de Ashutosh Saxena, profesor de ciencias de la computación en la Universidad de Cornell (en Ithaca, Nueva York), que ya había enseñado a robots a identificar objetos comunes, a recogerlos y a colocarlos de forma estable en lugares adecuados, ahora ha añadido el elemento humano al enseñar a los robots a "imaginar" dónde y cómo dentro de una habitación las personas podrían sentarse, trabajar o simplemente pasar, y a colocar los objetos teniendo en cuenta la relación normal de estos objetos con las personas imaginarias que el robot proyecta en su campo de visión. Los trabajos previos sobre la colocación de objetos por robots se basaron en modelar las relaciones entre estos objetos. El teclado va delante del monitor, y el ratón va al lado del teclado. Pero eso no es efectivo si el robot coloca el monitor, el teclado y el ratón en la parte posterior de la mesa, de cara a la pared. Relacionar los objetos con personas no sólo evita errores como el de colocar de cara a la pared el monitor, sino que también hace que el cálculo sea más fácil, ya que cada objeto se describe en términos de su relación con un conjunto pequeño de posturas humanas, en vez de con la larga lista de otros objetos en el escenario. Un ordenador determina estas relaciones observando imágenes tridimensionales de habitaciones que contienen objetos, en las cuales "imagina" figuras humanas, ubicándolas en relaciones prácticas con los objetos y muebles. No es necesario ubicar una persona sentada allí donde no hay una silla. El ordenador del robot calcula la distancia hasta los objetos desde varias partes de las figuras humanas imaginadas, y determina la orientación de los objetos. Con el tiempo, el ordenador aprende las cosas comunes: Muchas personas imaginarias están sentadas en el sofá de cara al televisor, y el televisor siempre está frente a ellas. El control remoto generalmente está al alcance de una persona, y rara vez cerca de los pies de una persona que esté de pie en vez de sentada. Para un robot es más importante averiguar cómo va a ser usado un objeto por los humanos que saber qué es el objeto. Los investigadores comprobaron su método usando imágenes de salas de estar, cocinas y oficinas obtenidas de la Galería 3D de Google (Google 3D Warehouse), y luego usando imágenes de apartamentos y oficinas locales. Posteriormente, programaron un robot para que realizara las colocaciones previstas de objetos en entornos de esas clases. Luego, algunos voluntarios que no estaban vinculados al proyecto evaluaron cuán bien estaba colocado cada objeto en una escala del 1 al 5. Comparando varios algoritmos, los investigadores encontraron que las colocaciones basadas en el contexto humano fueron más precisas que las basadas exclusivamente en las relaciones entre los objetos; pero los mejores resultados se obtuvieron al combinar el contexto humano con las relaciones entre los objetos, obteniéndose en ese caso una evaluación media de 4,3. Yapa: Curso Inglés Bbc English Completo (1-96) - Mp3 (Con Todas Las Lecciones En Pdf) Curso de inglés que consta de 96 lecciones en MP3 de unos 20 MB cada una, el pack total pesa 1,7GB aproximadamente. -Tamaño: 1,7GB -Género: Aprender Inglés -Lecciones: 1 - 96 -Formato: MP3 y PDF Mas info en fuente
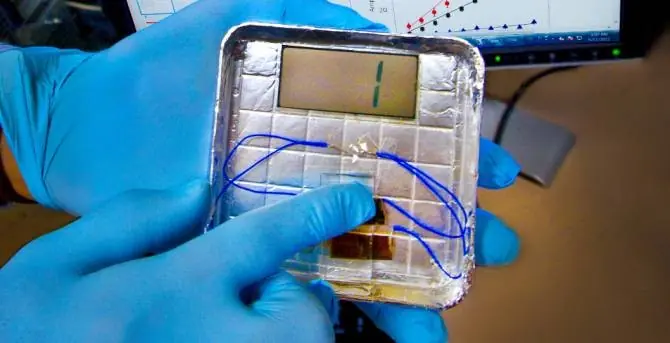
Imagínese recargando su teléfono móvil cuando camina gracias a un generador delgado como una hoja de papel, instalado en la suela de su zapato. Esta escena, que parece sacada de una historia de ciencia-ficción, está ahora un poco más cerca de convertirse en realidad, gracias al desarrollo de un singular sistema de generar electricidad que se vale de ciertos virus de un tipo inofensivo para el Ser Humano, los cuales convierten la energía mecánica en electricidad. Este llamativo método de generación vírica de electricidad ha sido desarrollado por científicos del Laboratorio Nacional estadounidense Lawrence Berkeley (Berkeley Lab), en California. El equipo de Seung-Wuk Lee puso a prueba su exótica técnica creando un generador que produce suficiente corriente eléctrica como para alimentar a una pequeña pantalla de cristal líquido. Funciona golpeando ligeramente con un dedo sobre un electrodo de la forma y tamaño de un sello de correos, cubierto por una capa integrada por virus, modificados artificialmente para la citada función. Estos virus convierten la fuerza mecánica de los golpecitos en una carga eléctrica. Este curioso generador eléctrico vírico es el primero en producir electricidad utilizando las propiedades piezoeléctricas de un material biológico. La piezoelectricidad es la acumulación de una carga eléctrica en un sólido en respuesta a la tensión mecánica. Un aspecto clave del diseño del generador es que los virus se distribuyen por sí solos en una película ordenada, lo que permite al generador funcionar debidamente. El importante avance tecnológico alcanzado con este generador vírico podría llevar a la fabricación a escala industrial de diminutos dispositivos capaces de recoger la energía eléctrica de las vibraciones producidas por actividades cotidianas como cerrar una puerta o subir por unas escaleras. El éxito en el diseño de este generador también brinda un posible camino alternativo, y más simple, para fabricar dispositivos microelectrónicos. Se necesita investigar más, pero el trabajo realizado hasta ahora por el equipo de Seung-Wuk Lee constituye un prometedor primer paso hacia el desarrollo de generadores de energía eléctrica personales, accionadores para el uso en nanodispositivos, y otros aparatos basados en los conceptos de este naciente campo de la electrónica viral. link: http://www.youtube.com/watch?feature=player_embedded&v=F1PzYi8jmuo
Otra entrega de libros basicos y otros mas avanzados sobre esta materia fundamental en muchas carreras de ingenieria. Libros: -Fisica Tipler,Mosca Volumen 1 y 2 -Fisica Resnick Volumen 1 y 2 -Fisica Serway Volumen 1 y 2 -Solucionarios Mis otros posts: http://www.taringa.net/posts/ciencia-educacion/15090717/Solucionarios-de-libros-de-la-facultad.html www.taringa.net/posts/ciencia-educacion/15070391/Fisica-1-y-2-Sears-y-yapa.html link por mp. saludossss
Buena parte del calentamiento oceánico del último medio siglo es de origen humano Los océanos se han calentado en los últimos 50 años, pero no sólo por fenómenos naturales. Una nueva investigación realizada por un equipo de expertos de Estados Unidos, Japón y Australia confirma que el calentamiento marítimo observado en estos últimos 50 años concuerda con los modelos climáticos sólo si esos modelos incluyen el efecto del aumento conocido de la concentración de los gases de efecto invernadero durante el siglo XX. Aunque éste no es el primer estudio para identificar una influencia humana en el calentamiento observado del mar, sí es el primero en proporcionar un examen en profundidad de cómo las incertidumbres en las observaciones y en los modelos afectan a la conclusión de que los humanos somos los principales responsables. Aunque el equipo de Peter Gleckler, climatólogo en el Laboratorio Nacional estadounidense Lawrence Livermore, ubicado en Livermore, California, realizó una serie de pruebas para tener una medida del impacto de varias incertidumbres, los investigadores no encontraron ninguna evidencia de que el calentamiento simultáneo de las capas superiores de los océanos pueda ser explicado basándose exclusivamente en la variabilidad natural del clima: Los humanos hemos desempeñado un papel dominante. En pocas palabras, el estudio respalda la conclusión de que la mayor parte del calentamiento global observado en los océanos durante el último medio siglo es atribuible a las actividades humanas. Yapa Cursos y Manuales para Varios Instrumentos Musicales Curso de Armonica Curso de Bajo Electrico Curso de Batería Curso de Bongo Curso de Clarinete Curso de Flauta Traversa Curso de Guitarra Curso de Piano Curso de Saxo Curso de Trombón Curso de Tuba Curso de Teclado Curso de Vocalizacion Este y mas libros: Datos en la fuente
Par de libros de Sears indispensables para la facu y de yapa Serie Schaum de Fisica con muchos problemas resultos .. Enlaces por ACA
Libros de Electronica y Electricidad Universitaria Fundamentos de aplicaciones en electromagnetismo .pdf Introducción al análisis de circuitos - boylestad.pdf Circuitos Eléctricos - James W. Nilsson .pdf Todos estos libros y mas en